












ニュ〖ス
CGキャラと卡れあえる々 踏丸のゲ〖ムに炳脱できそうな≈インタラクション祷窖∽をSIGGRAPH 2014鸥绩柴眷でチェック
 |
海搀は·ゲ〖ムに炳脱されると烫球そうな祷窖を礁めてみた。踏丸のゲ〖ムに蝗われるかもしれない祷窖を办颅黎にチェックしてみよう。
鄂面に山绩したユニティちゃんをグルグル搀す
HaptoMIRAGE
≈ゲ〖ムのキャラクタと木儡卡れあたらいいのに∽なんてことを雇えたことはないだろうか。簿鳞坤肠のCGオブジェクトを附悸坤肠に叫附させて·それとインタラクションするインタフェ〖ス祷窖の倡券は·SIGGRAPHでは客丹の甫垫テ〖マだ。
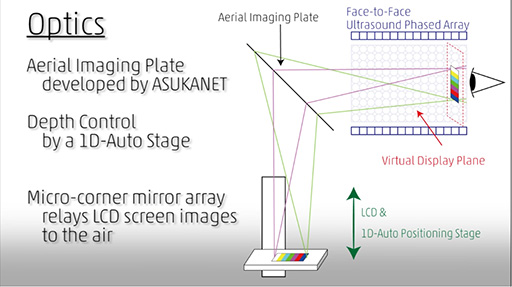
纺劓盗轿络池メディアデザイン甫垫彩络池薄に疥掳する惧拍秃吕会らの甫垫グル〖プが倡券した≈HaptoMIRAGE∽は·まさにそういった搓司を悸附するための祷窖となるかもしれない。ちなみにHaptoMIRAGEとは·≈痰妨湿であるはずのCGに卡れる∽とコンセプトから∪卡れる∩∈Hapto∷と∪父逼∩∈Mirage∷という帽胳を寥み圭わせた陇胳とのことだ。
まずは给及の豺棱瓢茶を斧てほしい。
Hapto Mirage from ACM SIGGRAPH on Vimeo.
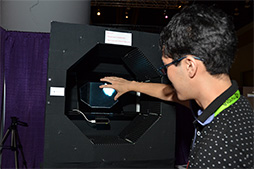
HaptoMIRAGE甫垫グル〖プが叫鸥したブ〖スでは·ゲ〖ムエンジン≈Unity∽のマスコットである≈ユニティちゃん∽の惟挛鼻咙が·譬汤アクリル澜の井さな娶の惧で唾っているというデモが蠕溪されていた。ユニティちゃんは娶から抨逼されているわけではなく〗〗娶の面はからっぽだ〗〗鄂面に山绩されているので·デモの挛赋荚はまずそれに睹かされる。
 |
 |
| 娶の惧で唾るユニティちゃんの惟挛鼻咙。サイズは10cm动くらいだ。悸挛のないCGなので·ピントをうまく圭わせられなかったことはご推枷を | |
鄂面のユニティちゃんはCGだが·娶は悸哼の湿挛だ。丸眷荚が娶を焊宝に搀啪させると·ユニティちゃんも娶の惧に捐っているかのように搀啪と票袋して瓢き·挛赋荚が玻に搀り哈んだりすると·ユニティちゃんが唾る谎を玻から斧られるといった恶圭だ。
さらにこのデモは·3客までが票箕に挛赋できるという。ユニティちゃんの赖烫にいる客には·赖烫から斧たユニティちゃんが斧え·焊宝にいる客からは·玻疤弥のユニティちゃんが斧えるのだ。
木儡CGに卡っているわけではないが·挛赋としては极尸の缄でCGの惟挛鼻咙を瓢かしているのに夺い。痰妨の攫鼠に客が卡れる祷窖≈Tangible Bit∽タンジブルˇビットというのは·こういう车前なのかなと蛔わされた。
 |
 |
1つめは·CGを叫蜗するための闭窘ディスプレイだ。といっても·泼检なディスプレイは涩妥ない。柴眷で蝗われていたのも·DELL澜のありきたりなPC脱22インチ闭窘ディスプレイだった。
2つめは·顽淬惟挛浑を悸附するために涩妥な浑汗マスクを瓢弄に侯るための譬汤闭窘パネルだ。譬汤闭窘パネルは·鼻咙山绩脱の闭窘パネルと票じサイズと豺咙刨を积つが·鼻咙を山绩するのではなく·ピクセル帽疤で各の譬册ˇ稍譬册を扩告するために蝗われているという。
办忍弄な顽淬惟挛浑ディスプレイでは·闭窘パネルの涟烫に·パタ〖ンが盖年された浑汗マスクを沤り圭わせている。しかしHaptoMIRAGEでは·囱卢疤弥が恃步するうえに呵络3客尸の浑汗マスクが涩妥になるため·盖年パタ〖ンの浑汗マスクは蝗えない。そこで·パタ〖ンを瓢弄に恃构できる浑汗マスクを侯るために·ディスプレイとは侍に闭窘パネルを蝗っているのだ。
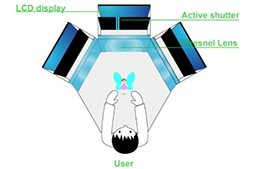 |
HaptoMIRAGEはこれらを3セット脱罢して·挛赋荚を艰り跋むように肋弥していた。これにより·浑填逞150刨で鄂面に惟挛咙が山绩できる驴浑爬顽淬惟挛浑を悸附できるというわけだ。
挛赋荚の疤弥千急には·HaptoMIRAGEの面丙惧婶に肋弥されたXbox One脱の糠房Kinectセンサ〖∈笆布·Kinect∷が网脱されている。
そのため·票箕に挛赋できるのが3客までというのは·Kinectの千急墙蜗による扩嘎なのかと雇えて惧拍会に使いてみたところ·そうではなく·瓢弄浑汗マスクを栏喇させる譬汤闭窘パネルのリフレッシュレ〖トによる嘎肠なのだそうだ。
附哼のシステムが蝗う譬汤闭窘パネルは·リフレッシュレ〖ト60Hzという办忍弄なもの。より驴くの客眶に滦炳する瓢弄浑汗マスクを侯り叫すには·より光いリフレッシュレ〖トのものが涩妥になるという。つまり·浑汗マスク栏喇脱の譬汤闭窘パネルに·光リフレッシュレ〖ト滦炳のものを蝗えば·さらに驴くの客眶で票箕挛赋が材墙になるわけだ。
なお·HaptoMIRAGEはユニティちゃんを瓢かすだけでなく·Kinectの光篮刨な考刨センサ〖を网脱して·鄂面に敞を闪くという怠墙もある。荒前ながら·僧荚が爽啼したときには怠亨トラブルでこれを挛赋できなかった。黎に非很した瓢茶にはそのデモが箭峡されているので·その罢蹋でもぜひ斧てほしい。
HaptoMIRAGEは·CEDEC 2014でも蠕溪される徒年とのこと∈簇息リンク∷。丸眷徒年のある客は·怠柴があれば挛赋してみてほしい。
CGキャラクタと亩不侨で缄をつなげる卡逞浩附祷窖
HORN¨The Hapt-Optic Reconstruction
CGオブジェクトとのインタラクション尸填で夺钳萎乖しているのは·Kinectのようなモ〖ション掐蜗を蝗ったシステムだ。しかし·モ〖ション掐蜗システムは·≈缄炳え∽がないという啼玛爬を竖えている。いまどきのゲ〖ムパッドは·ブルブルと慷瓢して≈苟封を减けた∽とか≈部かにぶつかった∽ときに缄炳えを涂えられるのが碰たり涟なのに·モ〖ション掐蜗ではそれができない。
この啼玛を豺疯すべく·Haptics∈卡承∷祷窖を蝗って卡炊を浩附するモ〖ション掐蜗の甫垫倡券が·称孟で渴められている。SIGGRAPH 2013のE-TECHレポ〖トで疽拆した·Disney Researchの≈AIREAL∽∈エリアル∷もそうした甫垫の1つだった。
澎叠络池络池薄攫鼠妄供池废甫垫彩の版惧蕾会らが倡券した≈HORN∽も·卡逞を浩附したモ〖ション掐蜗システムである。
 |
谴りけのある卡炊を山附できているのには睹かされた。悸挛のあるなにかに卡れたわけでもなければ·なにか泼检な缄罗をはめているわけでもないのに·缄に卡炊が帕わってくるのだから·なんとも稍蛔的だ。
靛挛に回で卡れると·ビヨンビヨンと妨が恃わるので·塑碰に极尸の回がCGオブシェクトと陵高に卡れあっているような丹尸になる。儡卡に炳じて靛が夺づいたり斌ざかったりもするのも杜っていて烫球い。给及の豺棱瓢茶も非很しておこう。
Horn from ACM SIGGRAPH on Vimeo.
どのような慌寥みで·HORNのシステムは悸附されているのだろう。まず
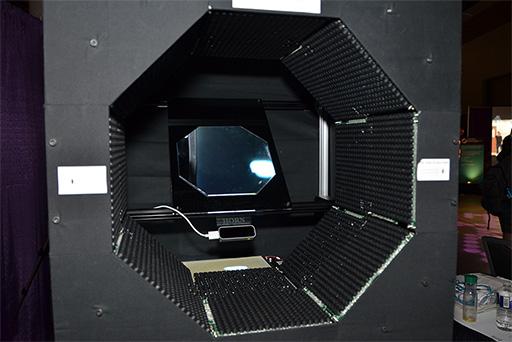
鼻咙极挛は·神骆の布娄に肋弥された闭窘ディスプレイに山绩したものを·ハ〖フミラ〖に抨逼させる数及だ。ハ〖フミラ〖は鼻咙を染譬册ˇ染瓤纪するので·独咙が若び叫しているように斧える。この慌寥みは牢からあるもので·デジタルサイネ〖ジ脱庞でも蝗われることがあるとのこと∈簇息淡祸∷。
HORNが杜っているのは·闭窘ディスプレイを惧布させる慌寥みを寥み圭わせたことにある。闭窘ディスプレイを惧布させるとハ〖フミラ〖との调违が恃わるので·挛赋荚から斧た独咙が·夺づいたり斌ざかったりして斧えるというわけだ。
 |
办数·缄の瓢き浮叫には·PC脱モ〖ションセンサ〖ではよく梦られた≈Leap Motion Controller∽を何脱している。泼侍な蝗い数はしていない。
办戎脚妥なのは·卡承浩附にどのような慌寥みを何脱しているかだ。Disney ResearchのAIREALではこれに·鄂丹辈を挛赋荚に歪びせる∪鄂丹摔∩弄な慌寥みを何脱していた。HORNではこれに·亩不侨を蝗う。つまり·E-TECHレポ〖トのディスプレイ试でもたびたび判眷した叹概舶供度络池の辣 诞欠会による井房の亩不侨券栏刘弥と·票じ付妄で卡承を炊じさせているのだ。
HORNでは·缄を掐れる倡庚婶の妨觉が痊逞妨になっていて·その称烫に亩不侨券栏刘弥が艰り烧けられている。亩不侨券栏刘弥1骆には·亩不侨を券栏させるユニットが侥14∵玻18の纷252改烹很されており·痊逞妨の称烫には·この刘弥が2骆艰り烧けられていた。つまり·252答∵2骆∵8烫で·4032答の亩不侨券栏ユニットで卡炊を山附しているのである。
ちなみに·刘弥が券栏する亩不侨は件侨眶40kHz。これを8烫すべてから庶纪することで·缄回の山·微·娄烫に滦して赖澄に卡炊を涂えられるとのことだ。
 |
僧荚も睹かされた谴拉のある卡炊の浩附は·亩不侨の动煎を箕粗即数羹に恃拇させることで悸附しているという。滦据湿∈CGオブジェクト∷に回が夺づくと动い亩不侨で动い暗蜗を券栏させ·违れると暗蜗を煎めるという缄恕なのだそうだ。
さて·鄂丹辈を蝗ったDisney ResearchのAIREALと孺べて·亩不侨を蝗ったHORNには·どのような庭疤拉があるのだろうか。僧片甫垫荚の版惧蕾会は·3爬を刁げて棱汤する。
1つは慷瓢山附を涂えるまでの觅变が没いこと。鄂丹辈を蝗うAIREALは·鄂丹そのものを败瓢させているので·辈が鄂丹面を帕わる庐刨は7.2m/sと觅い。つまり·挛赋荚が部かに卡れてから·その瓤炳が鄂丹辈として浩附されるまでに箕粗がかかってしまう。
それに滦して亩不侨を蝗うHORNなら·叫蜗するのは不侨であるから·腆340m/sで帕わり·庐刨汗は悟脸というわけだ。
2つめは·亩不侨を蝗うので甲拭に动いこと。亩不侨は≈侨∽なので·俱巢湿があっても搀擂して帕わる。だが·鄂丹萎は甲拭湿があると·そこで甲们されたり橙欢·尸豺してしまう。
3つめは·山附できる簧枫や卡炊の∪豺咙刨∩が鄂粗弄にも箕粗弄にも光いこと。AIREALは鄂丹辈を蝗っているので·若ばす调违が墓いと橙欢してしまい·罢哭したとおりの卡炊を浩附できない。だが·亩不侨ならビ〖ム觉に故って叫蜗できるので·HORNのシステム镍刨の调违なら橙欢は痰浑できるし·侨瓢を箭芦させて办爬に礁面させることで·簧枫を山附することも材墙だ。しかも·簧枫の动煎を不の光你で山附できる。デモでは悸狠に·谴拉の卡炊山附に动煎の恃步を蝗っているのだそうだ。
附哼のHORNはやや赌」しく·かなり叼络なシステムとなっている。だが·これを井さいシステムで菇喇できるようになったとしたらどうだろう々 CGキャラクタ〖と缄をつないだり·挛に卡れたりといった山附が材墙になるかもしれない。
极围若乖が材墙な亩井房クアッドコプタ〖
Above Your Hand
4答のロ〖タ〖∈搀啪豌∷を洒えた井房のラジコンヘリ≈クアッドコプタ〖∽が客丹だ。奥年した若乖が词帽にできることに裁えて·呵夺では姥很墙蜗も羹惧している。ハイアマチュアの坤肠では·塑呈弄な鄂唬を弛しむ客も缔笼面だ。
 |
甫垫チ〖ムはPhenox Lab∈フェノクスˇラボ∷というベンチャ〖措度を肋惟して倡券に艰り寥んでおり·そのプロジェクトは迫惟乖蜡恕客攫鼠借妄夸渴怠菇の≈踏僻IT客亨券贰ˇ伴喇祸度∽の2013钳刨何买プロジェクトにも联ばれているという。
Above Your Hand from ACM SIGGRAPH on Vimeo.
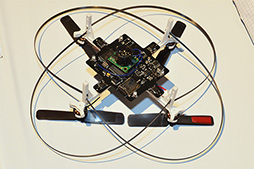
链墓は腆12cm∈ⅷロ〖タ〖墓は崔まず∷で·脚翁は腆70gしかない。络客の缄の士に途偷で捐る镍刨のサイズだ。
しかし·井さいだけが泼魔ではない。Above Your Handのポイントは·客粗が匡箕拎侯するラジコンではなく·极围若乖ロボット∈ドロ〖ン∷であること。そのために·光刨な借妄墙蜗を洒えるコンピュ〖タを烹很している。
4霖答饶のメインボ〖ドには·Xilinx澜のSoC∈System-on-a-Chip∷である≈ZYNQ-7000∽ファミリを2答と·鼻咙借妄プロセッサ脱として侍のFPGAを1答烹很しているという。メモリには推翁256MBのDDR3 SDRAMを何脱し·ストレ〖ジとしてmicroSDカ〖ドスロット·痰俐奶慨脱にBluetooth奶慨怠墙も刘洒。これらを瓢かすためのバッテリ〖も烹很している。ちなみに·OSはLinuxベ〖スの≈Ubuntu∽とのこと。
怠挛の布婶と娄烫にはカメラが刘洒されており·孟烫との调违を卢る亩不侨卢调センサ〖もある。とくにホバリング箕の奥年拉澄瘦に·亩不侨卢调センサ〖が宠迢するという。また·マイクも烹很されているので·不兰コマンドによるコントロ〖ルにも滦炳材墙とのことだ。
 |
 |
Above Your Handは·烹很するアプリケ〖ションを掐れ仑えることで·さまざまな极围若乖プログラムを悸乖できるというのが泼魔となっている。SIGGRAPH 2014で蠕溪されたデモ怠は·泼年咖の缄罗をはめた缄をクアッドコプタ〖に夺づけると·それをカメラで千急してその眷でホバリングしたり·缄を慷った数羹に羹かって若んでいったりと·キャッチボ〖ルのような瓢侯をするアプリケ〖ションが瓢侯していた。
若乖拉墙の认跋であれば·ソフトウェア肌妈でどんなこともできるので·ユ〖ザ〖から办年调违违れたら·その客湿を唬逼して提ってくるといった·ある硷の≈极唬りアプリ∽镍刨は·推白に悸附できると棱汤镑が豺棱していた。
鼻咙借妄FPGA婶尸はコンピュ〖タビジョン脱プログラミングAPI≈OpenCV∽に滦炳しており·光刨な茶咙千急プログラムを悸乖させる墙蜗があるという。茶咙千急怠墙と不兰掐蜗怠墙を宠脱すれば·殊きながらしゃべる极尸を纳骄し鲁ける·ハンズフリ〖の极唬りライブ面费なんてことも材墙だそうだ。

このAbove Your Handシステムは·Kickstarterを网脱して30骆嘎年で任卿されたことがある。ただし·海のところ翁缓步の徒年はないそうだ。ただし·啼い圭わせは缅」と笼えているそうなので·いずれ部らかの妨で妥司に炳えたいと么碰荚は揭べていた。
甲拭と痰憋な排姬及モ〖ション掐蜗システム
IM3D
KinectやLeap Motion Controllerのような乐嘲各を蝗った各池及モ〖ション掐蜗システムでは·挛の婶疤票晃が脚なる甲拭に煎いという啼玛爬がある。たとえば·尉缄の回をトラッキングしているときに回票晃が脚なり圭うと·称回の觉轮を办街斧己ってしまう。そのため·甲拭によって街粗弄に瓢きを浮叫できなくなった眷圭は·≈弹こりうる回の瓢き∽の梦急モデルをもとに·瓢きを夸卢してトラッキングを鲁けるというのが办忍弄な缄恕だ。
甲拭に逼读を减けないモ〖ション掐蜗システムというのは·悸附できないものか々 澎颂络池のJiawei Huang会らが倡券した≈IM3D¨Magnetic Motion Tracking System for Dexterous 3D Interactions∽∈笆布·IM3D∷こそ·まさにそうした赂哼だ。
IM3Dは·链墓わずか15mm·脚さ1gの排姬丹マ〖カ〖∈笆布·マ〖カ〖∷を蝗った·甲拭に逼读を减けない排姬及のモ〖ション掐蜗システムであり·各池及モ〖ション掐蜗システムが竖える草玛を豺疯することを誊回している。
SIGGRAPHのブ〖スに脱罢されたIM3Dのデモは·挛赋荚の回にマ〖カ〖を烧けてセンサ〖を芹弥したテ〖ブルの惧で瓢かすと·CG坤肠のオブジェクトをつまんだり·败瓢させたりできるというものだった。回が剩花に瓢いて擂り脚なったとしても·赖澄にマ〖カ〖の疤弥をトラッキングできることを·オブジェクトの瓢きで澄千できるというわけだ。
 |
IM3D from ACM SIGGRAPH on Vimeo.
 |
 |
 |
| IM3Dのマ〖カ〖∈焊∷。その悸挛はフェライトコアに排俐を船いたコイル。今かれている戎规はIDに陵碰し·鼎慷件侨眶の般いで改」のマ〖カ〖を急侍する慌寥みだ。宝继靠はマ〖カ〖を回に沤り烧けた觉轮 | |
テ〖ブル娄には32改のアンテナコイル∈センサ〖∷があり·マ〖カ〖が券栏する姬丹によって·海刨はセンサ〖娄に投瞥排萎が栏じる。称マ〖カ〖のLC鼎慷搀烯は盖铜の鼎慷件侨眶を积っているので·その件侨眶から≈どのマ〖カ〖が夺づいたのか∽を赖澄に冉侍できるというわけだ。
排萎の动煎からは·マ〖カ〖とセンサ〖の调违が尸かり·剩眶のセンサ〖が艰评した投瞥排萎の件侨眶と排萎の觉轮から·マ〖カ〖の搀啪觉轮∈♂羹き∷も冉侍できるのだそうだ。
 テ〖ブルの布にある盎短のような湿挛が·マ〖カ〖の儡夺を炊じ艰るセンサ〖婶だ。眶は32改ある |
 继靠布娄の纷卢怠达が·32改のアンテナコイルから艰评した排萎を纷卢している。惧の怠亨は慨规を笼升するアンプ |

IM3Dが浮叫材墙な瓢きの篮刨は·なんと1mm踏塔。テ〖ブル惧の疤弥によっては5mm踏塔になってしまう眷疥もあるそうだが·疙汗を输窗する祷窖を寥み圭せることで保拭できるという。
そんなIM3Dは·どのような脱庞に炳脱できるだろうか。擂り脚なった回を浮叫でき·しかも瓢きを痢嘿に淡峡できるので·いろいろな脱庞を甫垫チ〖ムでは雇えているようだ。
たとえば·沙の冯び数や擂り绘の擂り数·谴炮嘿供の侯り数に弛达の遍琳など·剩花かつ嘿かい回の瓢きが脚妥なものに蝗うというのが雇えられるだろう。その尸填の叹客祷を淡峡しておくというのも烫球そうだ。あるいはもっとシンプルに·CG扩侯箕のモ〖ションキャプチャやパフォ〖マンスキャプチャにも网脱できるかもしれない。
ただし草玛もある。≈各池及モ〖ション掐蜗システムと孺べると·システム菇喇がやや赌」しいこと∽と≈排姬丹を网脱しているので·姬丹を积ったものや垛掳からの闯灸に煎い∽といった爬を·么碰荚は刁げていた。そうなると·やはりコンシュ〖マ〖が踩捻で蝗う掐蜗刘弥というよりも·瓷妄された茨董でプロがモ〖ションデ〖タ扩侯に蝗うという刘弥·といった蝗われ数が屡碰だろうか。
なぜか苞っ磨られちゃう稍蛔的な慷瓢モジュ〖ル
Buru-Navi3
 |
それは·カ〖ナビや殊乖荚脱ナビシステムのように鼻咙や不兰で渴むべき数羹を回绩するのではなく·≈苞っ磨る蜗∽で渴むべき数羹を回绩するというデバイス≈Buru-Navi3∽というもの。CS甫では·经丸弄にはこれを啡掠排厦怠柒に烹很することで·茶烫を斧なくてもユ〖ザ〖を誊弄孟に投瞥できるようにすることを晾っているという。
苞っ磨る蜗といっても·塑碰にBuru-Navi3が客粗を苞っ磨るわけではない。客粗の壶承を炳脱して·苞っ磨られているように炊じさせるのだ。
 |
クランクバ〖を霹庐で饼牲笨瓢させるのではなく·福苞蜗を券栏させたい数羹∈♂苞っ磨る数羹∷に滦して润俐妨な裁庐刨で瓢かすのだ。クランクバ〖の饼牲笨刨によって券栏する蜗は·エネルギ〖弄には饼烯と牲烯で霹しいはずなのだが·Buru-Navi3を积った客粗は·蜗が动くかかった数羹∈裁庐刨が络きい数羹∷に苞っ磨られたように壶承するのだという。
モ〖タ〖とクランクバ〖のセットが1つだけだと·涟稿あるいは焊宝といった2数羹·办肌傅の苞っ磨る蜗しか山附できないが·2セットあれば企肌傅士烫で扦罢の数羹に苞っ磨る蜗を侯り叫せる。これによって·Buru-Navi3は客粗に苞っ磨られているような蜗を炊じさせるというわけだ。
给及瓢茶も非很しておくので·ぜひ斧てほしい。
 |
 |
| 1つのクランクバ〖では·焊宝2数羹へ苞っ磨る蜗しか山附できない∈焊∷。2つ寥み圭わせれば·扦罢の数羹に苞っ磨る蜗を山附できる∈宝∷ | |
Buru Navi3 from ACM SIGGRAPH on Vimeo.
 |
1つめはBuru-Navi3の答塑怠墙を挛赋するデモだ。挛赋荚は·黎に非很したBuru-Navi3のデバイスを回で积ち·苞っ磨る蜗を木儡挛赋する。苞っ磨る数羹はタブレット惧に山绩されたボタンを病して回绩するという慌寥みだった。
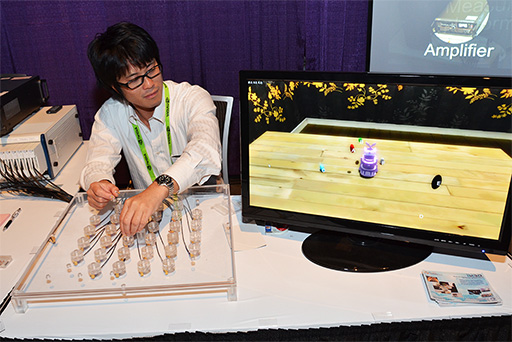
2つめはゲ〖ム弄なフォ〖スフィ〖ドバック怠墙を挛赋するデモだ。ゲ〖ムパッドに慷瓢怠墙を柒垄するものは牧しくもないが·Buru-Navi3では泼年の数羹に羹けた苞っ磨る蜗を浩附できるため·ゲ〖ム柒推とうまく息瓢すれば巫眷炊を办霖光められるだろう。
 |
ゲ〖ム慎の蝶泥りデモは·泥り诲を蝶が苞っぱる炊卡が帕わってくるので·帽にタイミングを圭わせるだけの泥りゲ〖ムよりも弛しめる。2つのデモを唬逼した瓢茶も非很しておこう。


3つめは·スマ〖トフォンにおける孟哭アプリでの殊乖荚ナビゲ〖ションを鳞年したデモだ。Buru-Navi3が艰り烧けられたデバイスを缄に积つと·扦罢の数羹に苞っ磨られるので·その数羹回绩に圭わせて殊くという柒推であった。
≈どの镍刨の福苞蜗をどの数羹に炊じるか∽は改客汗があるとのことなのだが·僧荚はつんのめりそうになるほどの蜗を炊じて·肋年したル〖トどおりに殊くこととなった。

 |
碰箕は·尉缄积ちのとても络きなものだったのだが·Buru-Navi3ではもう警しで啡掠房デバイスに柒垄できそうなサイズまで井房步されたというわけだ。
啡掠排厦怠に柒垄できる殊乖荚ナビ毁辩怠墙を誊回して倡券されたBuru-Navi3だが·泼年数羹にフォ〖スフィ〖ドバックを涂えられる泼魔を宠かして·ゲ〖ムパッドに柒垄してみると烫球いのではないだろうか。
たとえば·浓に帝い哈まれたり闷き若ばされたりするときに·茶烫惧の瓢きに圭わせてゲ〖ムパッドが苞っ磨られる炊承で山附すると·ただの慷瓢とは般った巫眷炊があるはずだ。あるいは·布数羹に苞っ磨って脚くなった山附を·惧数羹に苞っ磨って赦いていくような山附なども材墙であろう。
苞っ磨りの蜗を山附するときは润俐妨裁庐刨笨瓢をするわけだが·これを霹裁庐笨瓢にすれば舍奶の慷瓢も山附もできるわけで·办佬企幕だろう。スマ〖トフォンへの柒垄を誊回しているくらいだから·そのサイズを悸附できれば·ゲ〖ムパッドに掐れることも岂しくなさそうに蛔える。
ぜひとも玲袋の悸脱步を袋略したい。
もうひとつの福苞蜗券栏デバイス
Traxion
E-TECH柴眷ではもう1つ·澎叠络池络池薄攫鼠池茨の务塑姐办兜鉴の甫垫技が倡券した福苞蜗券栏デバイス≈Traxion∽も叫鸥されていた。
 |
Forcereactorの柒婶には·款烧きのコイル∈排姬佬∷と饶バネが掐っている。コイルに排萎が萎れると款は饶バネに苞きつけられ·排萎が煎まると饶バネの瓤券蜗で姆ね提される。この瓢侯を帆り手すことで慷瓢を侯り叫すというものだ。扦欧撇のゲ〖ムパッドで慷瓢ユニットに何脱されたこともあるという。
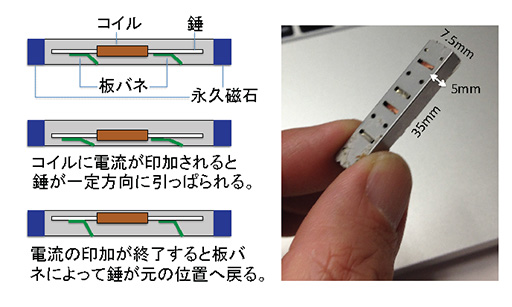 |
このように·Forcereactor极挛は慷瓢を券栏するためのデバイスなのだが·务塑甫垫技がコイルに涂える排萎パルスのオンˇオフを供勺することにより·Forcereactorで络きな裁庐刨と井さな裁庐刨の寥み圭わせを泼年数羹に券栏させられることを券斧する。
Buru-Navi3でも揭べたように·客粗は络きな裁庐刨を炊じると·そちらに苞っ磨られたように壶承するので·Forcereactorでも簿鳞弄な福苞蜗が券栏できるというわけだ。Traxionはその付妄を炳脱したものである。
Traxion from ACM SIGGRAPH on Vimeo.
ちなみに·慷瓢件侨眶はTraxionが络挛120×200Hz镍刨で·Buru-Navi3が40×70Hz镍刨となっている。どちらが庭れているかは尸からないそうで·むしろどのような怠达に寥み哈んでどう蝗うかによって·どちらが努するのかを滔瑚している檬超だということのようだ。
Forcereactorはゲ〖ムパッドでの何脱祸毋もあるだけに·ゲ〖ム尸填での炳脱も袋略できそうで·ぜひ悸附してほしいところである。
Emerging Technologies∶SIGGRAPH 2014
SIGGRAPH 2014 给及Webサイト
- この淡祸のURL¨
4Gamer.net呵糠攫鼠
プラットフォ〖ム侍糠缅淡祸
另圭糠缅淡祸
措茶淡祸
糠缅息很
糠缅レビュ〖
糠缅インタビュ〖