










¥Æ¥¹¥È¥ì¥Ý¡¼¥È
Tegra K1ÅëºÜ¤Î³«È¯¥¥Ã¥È¡ÖJetson TK1¡×¤òÆ°¤«¤·¤Æ¤ß¤¿
¡¡2014ǯ7·î16Æü¡¤NVIDIA¤Ï¡¤GPU¥³¥ó¥Ô¥å¡¼¥Æ¥£¥ó¥°³«È¯¼Ô¥¤¥Ù¥ó¥È¡ÖGTC Japan 2014¡×¤ò³«ºÅ¤·¤¿¡£2014ǯ¤ÎGTC Japan¤Ç¤Ï¡¤ÁȤ߹þ¤ßµ¡´ï´ØÏ¢¤Î¥»¥Ã¥·¥ç¥ó¤¬ÂçÉý¤ËÁý¤¨¤Æ¤¤¤¿¡¤¤È¤¤¤¦ÏäÏÀè¤Î¥ì¥Ý¡¼¥È¤Ç¤ªÅÁ¤¨ºÑ¤ß¤À¤¬¡¤¤½¤ó¤Ê¤Ê¤«¤Ç¤âÃíÌܤ·¤¿¤¤¤Î¤¬¡¤»öÁ°ÅÐÏ¿¤¬É¬ÍפǤ«¤Äͽþ¤È¤Ê¤Ã¤Æ¤¤¤¿¡ÖJetson TK1¡×Âθ³¥»¥Ã¥·¥ç¥ó¤À¡£
¡¡NVIDIA¤ÎÁȤ߹þ¤ß¸þ¤±ºÇ¿·SoC¡ÊSystem-on-a-Chip¡Ë¤Ç¤¢¤ë¡ÖTegra K1¡×¤òÅëºÜ¤·¤¿³«È¯Íѥܡ¼¥É¤Ç¤¢¤ëJetson TK1¤Ï¡¤¹ñÆâήÄ̤¬»Ï¤Þ¤Ã¤Æ¤Ï¤¤¤ë¤â¤Î¤Î¡¤¤½¤Î¿ô¤¬¾¯¤Ê¤¯¡¤¿¨¤ì¤Æ¤¤¤ë¿Í¤â¤Þ¤À¤½¤ì¤Û¤É¿¤¯¤Ê¤¤¡£
¡¡º£²ó4Gamer¤Ç¤Ï¡¤¤½¤ó¤ÊJetson TK1¤ò¼ÂºÝ¤ËÂθ³¤Ç¤¤ë¤È¤¤¤¦¥»¥Ã¥·¥ç¥ó¤Ø»²²Ã¤Ç¤¤¿¤Î¤Ç¡¤¡ÖTegra K1ÅëºÜ¤Î¥ï¥ó¥Ü¡¼¥É¥³¥ó¥Ô¥å¡¼¥¿¡×¤Ë¿¨¤Ã¤Æ¤¤¿ÌÏÍͤò´Êñ¤Ë¤Þ¤È¤á¤Æ¤ß¤¿¤¤¤È»×¤¦¡£¥²¡¼¥à¤ÈľÀܤδط¸¤Ï¤Ê¤¤¤¬¡¤Tegra K1¤¬µ¤¤Ë¤Ê¤Ã¤Æ¤¤¤ë¿Í¤ä¡¤CUDA¤Ë¶½Ì£¤¬¤¢¤ë¿Í¤Ï¥Á¥§¥Ã¥¯¤·¤Æ¤Û¤·¤¤¡£
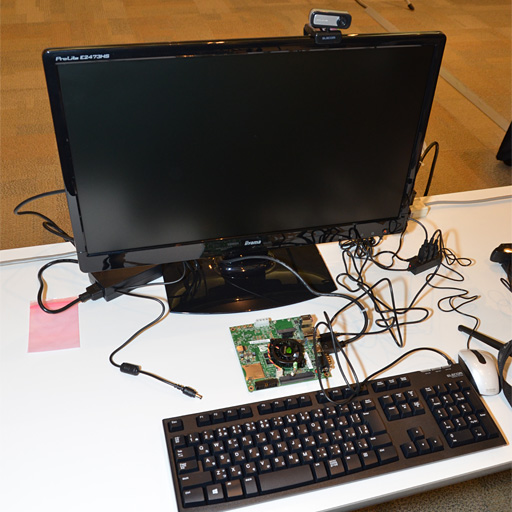
¡¡¤µ¤Æ¡¤¥»¥Ã¥·¥ç¥ó¥ë¡¼¥à¤Ç¤Ï¡¤³ÆÀʤ˥ǥ£¥¹¥×¥ì¥¤¤ä¥¡¼¥Ü¡¼¥É¤È¤ÎÀܳ¤ò½ª¤¨¤¿Jetson TK1¤¬ÃÖ¤¤¤Æ¤¢¤ê¡¤¼õ¹Ö¼Ô¤Ï¤¹¤°¤ËJetson TK1¤òÂθ³¤Ç¤¤ë¤è¤¦¤Ë¤Ê¤Ã¤Æ¤¤¤¿¡£
¡¡¥Ç¥£¥¹¥×¥ì¥¤¤È¤ÎÀܳ¤ÏHDMI¡ÊType A¡Ëü»Ò·Ðͳ¡£Jetson TK1¤Ï1¥Ý¡¼¥È¤ÎUSB 3.0¥Ý¡¼¥È¡ÊType A¡Ë¤ò»ý¤Ä¤Î¤Ç¡¤¤³¤³¤ËUSB¥Ï¥Ö¤òÀܳ¤¹¤ì¤Ð¡¤¤½¤ÎÀè¤Ë¥¡¼¥Ü¡¼¥É¤ä¥Þ¥¦¥¹¤Ê¤É¤Î¼þÊÕµ¡´ï¤òÀܳ¤Ç¤¤ë¡£¾å¤Î¼Ì¿¿¤Çµ¤¤Å¤¤¤¿¿Í¤â¤¤¤ë¤À¤í¤¦¤¬¡¤º£²ó¤Î¥»¥Ã¥·¥ç¥ó¤Ç¤Ï¥³¥ó¥Ô¥å¡¼¥¿¥Ó¥¸¥ç¥ó¤Î¥µ¥ó¥×¥ë¤òÆ°¤«¤¹¤¿¤á¤ËɬÍפʼþÊÕµ¡´ï¤È¤·¤Æ¡¤¥¨¥ì¥³¥àÀ½¤ÎWeb¥«¥á¥é¡ÖUCAM-C0220FBBK¡×¤â¥Ï¥Ö·Ðͳ¤ÇÀܳ¤µ¤ì¤Æ¤¤¤¿¡£
¡¡¥¡¼¥Ü¡¼¥É¤ä¥Þ¥¦¥¹¤Ï¡¤USBÀܳ¤Î¤â¤Î¤Ê¤é¥á¡¼¥«¡¼¤ÏÉÔÌä¤Ç¡¤Web¥«¥á¥é¤â¡¤¤è¤Û¤ÉÆüì¤Ê»ÅÍͤǤʤ¤¸Â¤êÀܳ¤Ç¤¤ë¤È¤Î¤³¤È¤À¤Ã¤¿¡£
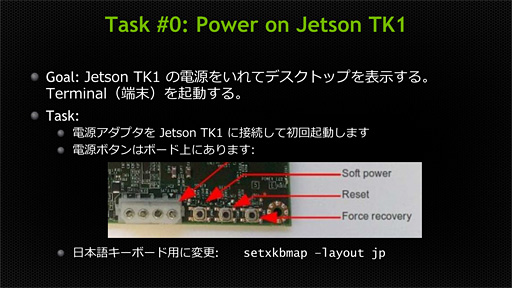
¡¡ÅŸ»¥æ¥Ë¥Ã¥È¤Ï¡¤¥Î¡¼¥ÈPC¤ËÉÕ°¤·¤Æ¤¤½¤¦¤ÊAC¥¢¥À¥×¥¿¡¼¤Ç¡¤ÆþÎϤÏAC100-240V/1.5A¡¤½ÐÎϤÏDC12V/5.0A¤È¤¤¤¦¥¹¥Ú¥Ã¥¯¤À¡£¤³¤ì¤òJetson TK1¤ÎÅŸ»ÆþÎÏü»Ò¤ËÀܳ¤¹¤ë¤È¡¤¤¤¤¤Ê¤êJetson TK1¾å¤ÎÎäµÑ¥Õ¥¡¥ó¤¬²ó¤ê»Ï¤á¤Æµ¯Æ°¤¹¤ë»ÅÍͤˤʤäƤ¤¤¿¡£Ëü¤¬°ìµ¯Æ°¤·¤Ê¤¤¾ì¹ç¤Ï¡¤Jetson TK1¾å¤ËÍÑ°Õ¤µ¤ì¤¿¾®¤µ¤Ê¡ÎReset¡Ï¥Ü¥¿¥ó¤â¤·¤¯¤Ï¡ÎSoft Power¡Ï¥Ü¥¿¥ó¤ò²¡¤¹¤ÈºÆµ¯Æ°¤Ç¤¤ë¤è¤¦¤À¡£
¡¡µ¯Æ°¸å¡¤ºÇ½é¤Ë¤ä¤ë¤Ù¤¤³¤È¤È¤·¤Æ»ØƳ¤µ¤ì¤¿¤Î¤Ï¡¤¡ÎCtrl¡Ï¡Ü¡ÎAlt¡Ï¡Ü¡ÎT¡Ï¥¡¼¤Ç¥³¥Þ¥ó¥É¥×¥í¥ó¥×¥È¤ò½Ð¤·¤Æ¤«¤é¤Î¡¤
> setxkbmap -layout jp
¤ÎÆþÎϤǡ¤¤³¤ì¤Ï¡¤¥¡¼¥Ü¡¼¥É¤Î¥ì¥¤¥¢¥¦¥È¤òÆüËܸì»ÅÍͤØÊѹ¹¤¹¤ëÁàºî¤ËÁêÅö¤¹¤ë¡£
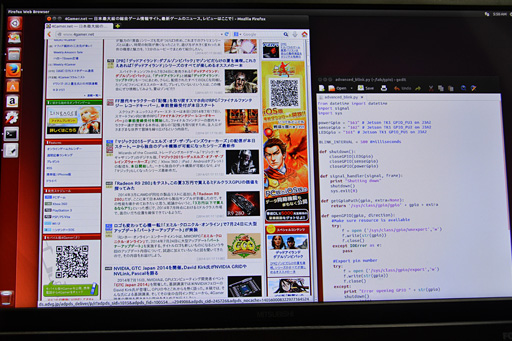
¡¡µ¯Æ°¤·¤Æ¤·¤Þ¤¨¤Ð¡¤¤¿¤À¤ÎUbuntuÅëºÜPC¤È¤¤¤Ã¤¿´¶¤¸¤Ç¡¤LAN¥±¡¼¥Ö¥ë¤Ç¥Í¥Ã¥È¥ï¡¼¥¯¤ÈÀܳ¤¹¤ì¤Ð¡¤¥×¥ê¥¤¥ó¥¹¥È¡¼¥ë¤Î¡ÖMozilla Firefox¡×¤«¤éWeb¥Ö¥é¥¦¥¸¥ó¥°¤âÉáÄ̤˹Ԥ¨¤Æ¤·¤Þ¤¦¡£
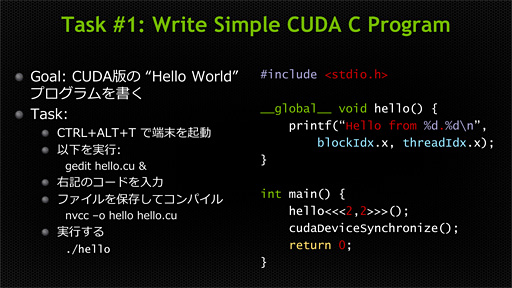
¡¡¤³¤³¤Ç¡¤¡ÖHello¡×¤ò½ÐÎϤ¹¤ë¤À¤±¤Î´ðÁÃŪ¤Ê¥×¥í¥°¥é¥à¤ÎÆþÎϤ¬²Ý¤»¤é¤ì¤¿¡£
¡¡CUDA¤Ï¡¤C¸À¸ì¥Ù¡¼¥¹¤Î¥×¥í¥°¥é¥ß¥ó¥°¸À¸ì¤Ê¤Î¤À¤¬¡¤¡ÖÍÑ°Õ¤·¤¿¥Ç¡¼¥¿¤ËÂФ·¤Æ¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤µ¤»¤ë¡×¤È¤¤¤¦³µÇ°¤Î³ÈÄ¥¤¬¤Ê¤µ¤ì¤Æ¤¤¤ë¡£¤½¤ì¤ò»²²Ã¼Ô¤Ë¼Â´¶¤·¤Æ¤â¤é¤ª¤¦¤È¤¤¤¦¤Î¤¬ÁÀ¤¤¤À¡£
¡¡º£²ó¤Î¡ÖHello¡×¤Ç¤Ï¡¤2¡ß2¤Î¥¹¥ì¥Ã¥É¤òΩ¤Á¾å¤²¤Æ¡¤³Æ¥¹¥ì¥Ã¥É¤«¤é¡ÖHello¡×¤ò½ÐÎϤ¹¤ë¤è¤¦¤Ê¥×¥í¥°¥é¥à¤Ë¤Ê¤Ã¤Æ¤¤¤¿¡£
¡¡¥µ¥ó¥×¥ë¥ê¥¹¥È¤ÏEbersole»á¤¬¥¹¥é¥¤¥É¤Ç¼¨¤·¤Æ¤¤¤¿¤Î¤Ç¡¤¼ÂºÝ¤Ë¤ä¤ë¤³¤È¤Ï¤È¤¤¤¨¤Ð¡¤²èÌ̤Υµ¥ó¥×¥ë¤òÂǤÁ¹þ¤ß¡¤¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤À¤±¤À¡£
¡¡¤¿¤À¡¤CUDA¤Î´°Á´¤Ê½é¿´¼Ô¤«¤é¤¹¤ì¤Ð¡¤¥Æ¥¥¹¥È¥¨¥Ç¥£¥¿¤È¤·¤Æ¡Ögedit¡×¤¬ÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤È¤«¡¤CUDA¤Î¥½¡¼¥¹¥×¥í¥°¥é¥à¤Ï³ÈÄ¥»Ò¡Ö.cu¡×¤ÇºîÀ®¤¹¤ë¤È¤«¡¤¥³¥ó¥Ñ¥¤¥é¤Ï¡Önvcc¡×¤Ç¤¢¤ë¤È¤«¤¤¤Ã¤¿´ðÁÃŪ¤Ê¤³¤È¤ò¤³¤³¤Ç³Ø¤Ù¤ë¤Î¤Ç¤¢¤Ã¤¿¡£
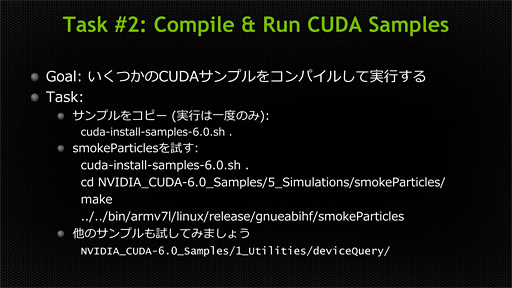
¡¡Â³¤¤¤Æ¤Î²ÝÂê¤Ï¡¤Jetson TK1¤Ë¥×¥ê¥¤¥ó¥¹¥È¡¼¥ë¤µ¤ì¤Æ¤¤¤ëCUDA 6¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤³¤È¤Ç¤¢¤ë¡£
¡¡¤³¤³¤Ç¤Ï¤Þ¤º¡¤¥³¥Þ¥ó¥É¥×¥í¥ó¥×¥È¤«¤éCUDA 6¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥Ô¡¼¤¹¤ë¤È¤³¤í¤«¤é»Ï¤Þ¤ë¡£¶ñÂÎŪ¤Ë¤Ï¡¤
> cuda-install-samples-6.0.sh .
¤ÈÆþÎϤ¹¤ë¤³¤È¤Ë¤Ê¤ë¡£ºÇ¸å¤Î¥¹¥Ú¡¼¥¹¤È¥Ô¥ê¥ª¥É¤ò˺¤ì¤º¤Ë¡£
¡¡Â³¤¤¤Æ¡¤
> cd NVIDIA_CUDA-6.0_Samples/5_Simulations/smokeParticles/
¤ÈÆþÎϤ·¡¤¥«¥ì¥ó¥È¥Ç¥£¥ì¥¯¥È¥ê¤ò¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à³¬Áؤβ¼¤È¤¹¤ë¡£Ä¹¤¤¥Ñ¥¹Ì¾¤ÏÃæÅÓ¤Þ¤ÇÂǤÁ¹þ¤ó¤Ç¡ÎTAB¡Ï¥¡¼¤ò²¡¤¹¤ÈÊä´°ÆþÎϤò¹Ô¤Ã¤Æ¤¯¤ì¤ë¤Î¤ÇÍøÍѤ·¤¿¤¤¡£
¡¡¥³¥ó¥Ñ¥¤¥ë¤Ï¡¤
> make
¤ÇOK¡£¥×¥í¥°¥é¥à¤ò½ñ¤´¹¤¨¤Ê¤¤¸Â¤ê¡¤¥³¥ó¥Ñ¥¤¥ë¤Ï°ìÅټ¹Ԥ¹¤ì¤Ð¤½¤ì¤Ç¤¤¤¤¡£
¡¡¼ÂºÝ¤Î¥×¥í¥°¥é¥à¼Â¹Ô¤Ï¡¤
> ../../bin/armv7l/linux/release/gnueabihf/smokeParticles
¤Ç¹Ô¤¨¤ë¡£¡ÖsmokeParticles¡×¤Î¤È¤³¤í¤òÊÌ¤Î¥×¥í¥°¥é¥à̾¤Ë¤¹¤ì¤Ð¡¤Ê̤Υµ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤³¤È¤â²Äǽ¤À¡£
¡¡¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò³Îǧ¤·¤Æ¤ß¤¿¤È¤³¤í¡¤¡ÖNVIDIA_CUDA-6.0_Samples¡×³¬Áز¼¤Ë¤Ï¤µ¤Þ¤¶¤Þ¤Ê¤â¤Î¤ò³Îǧ¤Ç¤¤¿¤Î¤Ç¡¤Jetson TK1¤òÆþ¼ê¤Ç¤¤¿¤é¡¤¤¤¤í¤¤¤í¤È¼Â¹Ô¤·¤Æ¤ß¤ë¤È¤¤¤¤¤Î¤Ç¤Ï¤Ê¤«¤í¤¦¤«¡£¸«¤¿ÌÜŪ¤ËÌÌÇò¤¤¤Î¤Ï¡¤Á°½Ð¤Î¡Ö5_simulations¡×°Ê³°¤À¤È¡Ö2_Graphics¡×¤¢¤¿¤ê¤«¡£
¡¡¼¡¤ÏWeb¥«¥á¥é¤ò»È¤¦¼Â¸³¤Ç¤¢¤ë¡£
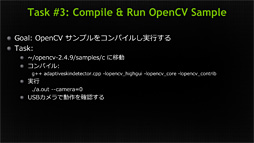
¡¡¶ñÂÎŪ¤Ë¤Ï¥³¥ó¥Ô¥å¡¼¥¿¥Ó¥¸¥ç¥óÍÑ¥×¥í¥°¥é¥ß¥ó¥°API¡ÖOpenCV¡×¤Î¥µ¥ó¥×¥ë¥³¡¼¥É¤òJetson TK1¾å¤Ç¼Â¹Ô¤¹¤ë²ÝÂê¤È¤Ê¤ë¡Ä¡Ä¤Î¤À¤¬¡¤¤½¤ÎÁ°¤Ë¡¤Web¥«¥á¥é¤ÎÆ°ºî¤ò³Îǧ¤¹¤ëɬÍפ¬¤¢¤ë¡£
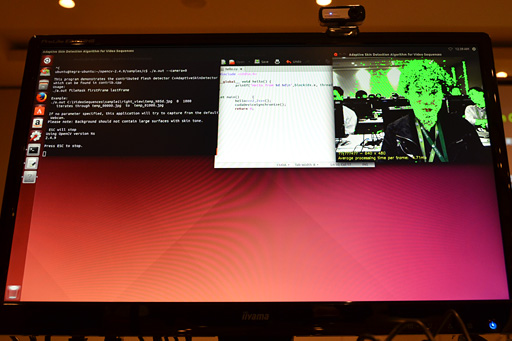
¡¡¤³¤Î¥«¥á¥éÆ°ºî³Îǧ¥×¥í¥°¥é¥à¤Ï¡¤¡Ö¸¡½Ð¤·¤¿È©¿§Éôʬ¤òÎп§¤Ë¥Þ¡¼¥¥ó¥°¤¹¤ë¡×¤È¤¤¤¦¤â¤Î¤Ç¡¤¿Í¤Î´é¤¬Îп§¤Ë¥Þ¡¼¥¥ó¥°¤µ¤ì¤ì¤ÐOK¤È¤Ê¤ë¡£
¡¡Web¥«¥á¥é¤ÎÆ°ºî¤¬´°Î»¤·¤¿¤È¤³¤í¤Ç¡¤¼ÂºÝ¤ÎCPU¤Ç¼ÂÁõ¤·¤¿OpenCV¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤¹¤ë¡£
¡¡¼Â¹Ô¤¹¤ë¤Î¤Ï¡¤´Æ»ë¥«¥á¥é¤Î¤è¤¦¤ËÄêÅÀÀßÃÖ¤µ¤ì¤¿¥«¥á¥é¤Î±ÇÁü¤«¤é¡¤Æ°ÂΤÈÇطʤòʬΥ¤¹¤ë¥¢¥ë¥´¥ê¥º¥à¡Öº®¹çÀµµ¬Ê¬ÉۡסÊMOG¡§Mixture of Gaussian Distribution¡Ë¤Î¥µ¥ó¥×¥ë¤À¡£
¡¡¥³¥ó¥Ñ¥¤¥ë¸å¡¤
> ./bgfg_segm_cpu -c 0
¤È¤·¤Æ¼Â¹Ô¤µ¤ì¤ë¤Î¤¬CPUÈÇMOG¥¢¥ë¥´¥ê¥º¥à¤È¤Ê¤ë¡£¼Â¸ú¥Õ¥ì¡¼¥à¥ì¡¼¥È¤Ë¤·¤ÆÌó5¡Á7fps¤È¤¤¤Ã¤¿¤È¤³¤í¤À¡£
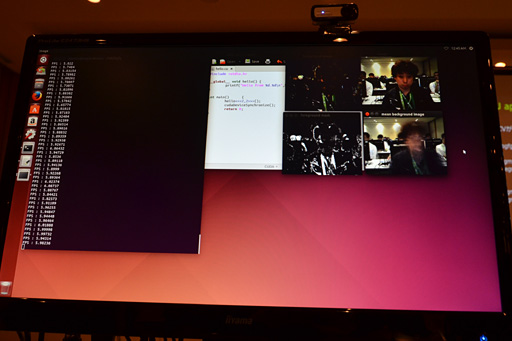
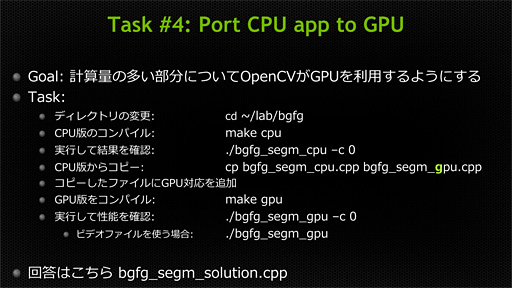
¡¡Â³¤¤¤Æ¤Ï¡¤¤³¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤òGPUÈǤ˲þ¤¤¹¤ë²ÝÂ꤬½Ð¤µ¤ì¤¿¤Î¤À¤¬¡¤¥»¥Ã¥·¥ç¥ó»þ´Ö¤¬Ã»¤¤¤³¤È¤â¤¢¤ê¡¤º£²ó¤Ï¡¤
> cp bgfg_segm_solution.cpp bgfg_segm_gpu.cpp
¤ÈÂǤÁ¹þ¤ß¡¤ÌÏÈϲóÅú¥×¥í¥°¥é¥à¡Öbgfg_segm_solution.cpp¡×¤ò¡Öbgfg_segm_gpu.cpp¡×¤È¤·¤Æ¥³¥Ô¡¼¤·¤Æ¥³¥ó¥Ñ¥¤¥ë¤¹¤ë¤Î¤ß¤Ëα¤Þ¤Ã¤¿¡£¶ñÂÎŪ¤Ë¤Ï¡¤
> make gpu
¡¡
¡¡¤Ç¥³¥ó¥Ñ¥¤¥ë¤·¡¤
> ./bgfg_segm_gpu -c 0
¤Ç¼Â¹Ô¤¹¤ë¡£
¡¡Æ±°ì¥¢¥ë¥´¥ê¥º¥à¤ò¼Â¹Ô¤·¤Æ¤¤¤ë¤Î¤Ç¡¤½èÍýÆâÍƤËÊѤï¤ê¤Ï¤Ê¤¤°ìÊý¤Ç¡¤¼Â¸ú¥Õ¥ì¡¼¥à¥ì¡¼¥È¤ÏºÇÂç¤Ç10Çܰʾå¸þ¾å¤¹¤ë¤³¤È¤ò³Îǧ¤Ç¤¤¿¡£¤³¤ì¤³¤½¤¬GPU¥Ñ¥ï¡¼¤Î²¸·Ã¤Ç¤¢¤ê¡¤Jetson TK1¡¤¤½¤·¤ÆTegra K1¤ÎÄìÎϤȤ¤¤¦¤ï¤±¤Ç¤¢¤ë¡£
¡¡ËܹƤνøÈפǿ¨¤ì¤¿¤È¤ª¤ê¡¤Jetson TK1¤ÏÁȤ߹þ¤ßµ¡´ï¸þ¤±¤Î³«È¯É¾²Á¥Ü¡¼¥É¤Ç¤¢¤ë¡£¤Ê¤Î¤Ç¡ÖTegra K1¤Î±é»»Àǽ¤ò³è¤«¤·¤Æ¡¤²¿¤«Ê̤ΥǥХ¤¥¹¤òÁàºî¤·¤¿¤¤¡×¤È¤«¡Ö²¿¤«Ê̤ΥǥХ¤¥¹¤Ø½ÐÎϤ·¤¿¤¤¡×¤È¤¤¤Ã¤¿¶ñ¹ç¤Ë¡¤³°Éôµ¡´ï¤È¤ÎϢư¤ò˾¤à¥æ¡¼¥¶¡¼¤â¿¤¤¤Ï¤º¤Ç¤¢¤ë¡£
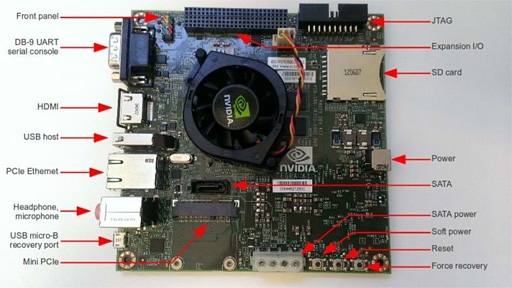
¡¡Jetson TK1¤Ë¤Ï¡¤Àè¤Ë½Ò¤Ù¤¿USB 3.0¤Î¤Û¤«¡¤¥·¥ê¥¢¥ë¥Ý¡¼¥È¤âÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤¬¡¤¤½¤ì¤è¤ê¤â¤µ¤é¤Ë¥í¡¼¥ì¥Ù¥ë¤ÊÆþ½ÐÎϤò¹Ô¤¦¤¿¤á¤ÎGPIO¡ÊGeneral Purpose Input & Output¡Ë¥Ý¡¼¥È¤âÈ÷¤ï¤Ã¤Æ¤¤¤ë¡£
¡¡¤³¤³¤Þ¤Ç¤Î²ÝÂê¤Ï¡¤¤É¤Á¤é¤«¤È¤¤¤¨¤Ð¡Ö¥³¥ó¥Ô¥å¡¼¥¿¤È¤·¤ÆJetson TK1¤ò¤É¤¦»È¤¦¤«¡×¤¬ÂоݤȤʤäƤ¤¤¿¤¬¡¤ºÇ¸å¤Î²ÝÂê¤Ï¡¤GPIO¤ò»È¤Ã¤Æ³°Éô¥Ç¥Ð¥¤¥¹¤È¤ÎϢư¤òÌܻؤ¹¤â¤Î¤È¤Ê¤Ã¤¿¡£
¡¡¤È¤Ï¤¤¤¨¡¤Ã»¤¤»þ´Ö¤Ç¤½¤ì¤Û¤É¹âÅ٤ʤ³¤È¤Ï¤Ç¤¤Ê¤¤¤Î¤Ç¡¤ÀÜÅÀ¥¹¥¤¥Ã¥Á¤ÈLED¤òÁȤ߹ç¤ï¤»¤¿¥·¥ó¥×¥ë¤Ê¼Â¸³¤¬¹Ô¤ï¤ì¤¿¡£
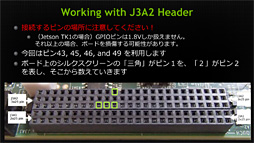
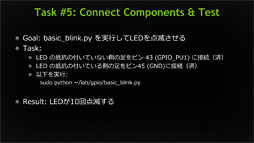
¡¡ºÇ½é¤Î¼Â¸³¤Ï¡¤43ÈÖ¥Ô¥ó¤È45ÈÖ¥Ô¥ó¤Ëº¹¤·¹þ¤Þ¤ì¤¿LED¤òÅÀÌǤµ¤»¤ë¤È¤¤¤¦²ÝÂê¤À¡£
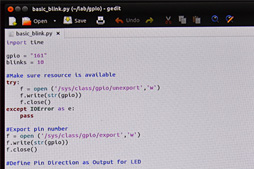
¡¡¥×¥í¥°¥é¥à¤Ï¡Ö~/lab/gpio/¡×¥Õ¥©¥ë¥À¤ËÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤Î¤Ç¡¤¼ÂºÝ¤Ë¤ä¤ë¤³¤È¤Ï¡¤
> sudo python ~/lab/gpio/basic_blink.py
¤È¤·¤Æ¼Â¹Ô¤µ¤»¤ë¤À¤±¤Ç¤¢¤ë¡£

¡¡LEDÀ©¸æ¤Î¥×¥í¥°¥é¥à¤Ï¥¹¥¯¥ê¥×¥È¸À¸ìPython¤Ç½ñ¤«¤ì¤Æ¤¤¤¿¤¬¡¤Jetson TK1¤Ë¤ª¤±¤ë´ðËÜŪ¤ÊGPIO·Ðͳ¤ÎÆþ½ÐÎϽèÍý¤ÏPyhton¤ÇÀ©¸æ¤¹¤ë¤³¤È¤Ë¤Ê¤Ã¤Æ¤¤¤ë¡£¤³¤Î¤¢¤¿¤ê¤Ï¡¤´ðÁü¸³¤ä¶µ°éÍѤΥï¥ó¥Ü¡¼¥É¥³¥ó¥Ô¥å¡¼¥¿¤È¤·¤ÆÃΤé¤ì¤ë¡ÖRaspberry Pi¡×¤È¤è¤¯»÷¤¿Éôʬ¤È¤¤¤¨¤ë¤À¤í¤¦¡£
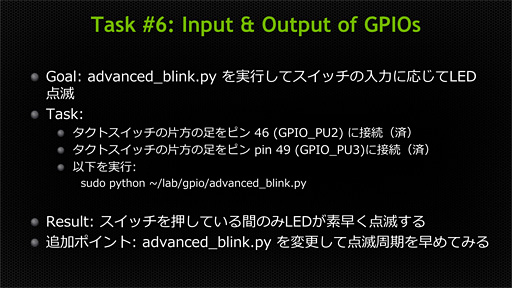
¡¡ºÇ¸å¤Î²ÝÂê¤Ï¡¤GPIO¦¤Î46ÈÖ¥Ô¥ó¤È49ÈÖ¥Ô¥ó¤ËÀÜÅÀ¥¹¥¤¥Ã¥Á¤òÀߤ±¡¤¤³¤Î¥ª¥ó/¥ª¥Õ¤ò²¾ÁÛŪ¤Ê¼þÊÕµ¡´ï¤«¤é¤ÎÆþÎϤȤ·¡¤¤½¤ì¤Ë¸Æ±þ¤¹¤ë·Á¤Ç¥×¥í¥°¥é¥à¦¤ÇLED¤òÅÀÅô¤µ¤»¤ë¤È¤¤¤¦¤â¤Î¤À¡£
¡¡¤³¤Á¤é¤â¥×¥í¥°¥é¥à¼«ÂΤÏÊݸºÑ¤ß¤Ê¤Î¤Ç¡¤
> sudo python ~/lab/gpio/advanced_blink.py
¤È¤·¤Æ¼Â¹Ô¤µ¤»¤ë¤À¤±¤À¤¬¡¤ÀÜÅÀ¥¹¥¤¥Ã¥Á¤ò²¡¤·¤Æ¤¤¤ë´Ö¤À¤±LED¤¬ÅÀÌǤ¹¤ë¤³¤È¤ò³Îǧ¤Ç¤¤¿¡£
¡¡ÄɲäΥµ¥Ö²ÝÂê¤È¤·¤Æ¡¤LED¤ÎÅÀÌÇ¥¿¥¤¥ß¥ó¥°¤òÊѹ¹¤¹¤ë¤È¤¤¤¦¤Î¤¬Í¿¤¨¤é¤ì¤¿¤¬¡¤¤³¤ì¤Ï¥×¥í¥°¥é¥à¤ò³«¤¤¤Æ¡ÖBLINK_INTERVAL =¡×¤Î¿ôÃͤòÊѤ¨¤ë¤À¤±¤ÇOK¡£Python¤Ï¥¹¥¯¥ê¥×¥È¸À¸ì¤Ê¤Î¤ÇºÆ¥³¥ó¥Ñ¥¤¥ë¤ÎɬÍפâ¤Ê¤¯¡¤¤¹¤°¤Ë¿ôÃÍÊѹ¹¤Î·ë²Ì¤òÈ¿±Ç¤·¤¿·Á¤Ç¼Â¹Ô¤Ç¤¤ë¤Î¤À¡£

¡¡¤Þ¤µ¤ËÆþÌç¤È¤¤¤Ã¤¿ÆâÍƤÀ¤Ã¤¿¤¬¡¤¤¤¤«¤¬¤À¤Ã¤¿¤í¤¦¤«¡£
¡¡Jetson TK1¤ÏÁȤ߹þ¤ßµ¡´ï¸þ¤±¤ÎÀ½Éʳ«È¯É¾²Á¥×¥é¥Ã¥È¥Õ¥©¡¼¥à¤Ç¡¤º£¤Î¤È¤³¤íήÄÌÎ̤âÈó¾ï¤Ë¾¯¤Ê¤¤¤¬¡¤¹ñÆâ¤Ç¤Ï¥ª¥ê¥ª¥¹¥Ú¥Ã¥¯¤¬Àµµ¬Éʤò°·¤Ã¤Æ¤¤¤ë¤Î¤Ç¡¤2Ëü4000±ß¡ÜÀǤǼ¡²ó°Ê¹ß¤ÎÆþ²Ùʬ¤òͽÌó¤Ç¤¤ë¡£Âç³Ø¤Î¸¦µæ¼¼¤Ï¤â¤Á¤í¤ó¤Î¤³¤È¡¤¸Ä¿Í¥ì¥Ù¥ë¤ÎÅŻҹ©ºîÍÑÅӤˤâ±þÍѤǤ¤½¤¦¤Ç¤¢¤ë¡£

¡¡¤³¤ì¤Þ¤Ç¡¤¤³¤³¤Þ¤Ç¹âÀǽ¤ÊGPU¥Ñ¥ï¡¼¤ò»È¤Ã¤Æ¤µ¤Þ¤¶¤Þ¤Ê¼þÊÕµ¡´ï¤ÈϢư¤µ¤»¤é¤ì¤ë°Â²Á¤Ê¥ï¥ó¥Ü¡¼¥É¥³¥ó¥Ô¥å¡¼¥¿¤Ï¤Û¤È¤ó¤É¤Ê¤«¤Ã¤¿¡£¾¯¤Ê¤¯¤È¤âÉ®¼Ô¤ÎÃΤë¸Â¤ê¤Ï³§Ìµ¤À¤Ã¤¿¤è¤¦¤Ë»×¤¦¡£Microsoft¤Î¡ÖKinect¡×¤¬¡¤¤½¤ÎÀǽ¤Ç¥¢¥Þ¥Á¥å¥¢ÅŻҹ©ºî¥·¡¼¥ó¤Ë¥â¡¼¥·¥ç¥ó¥»¥ó¥·¥ó¥°¥Ö¡¼¥à¤ò¹¤á¤¿¤è¤¦¤Ë¡¤Jetson TK1¤âº£¸å¡¤Î®ÄÌÎ̤¬Áý¤¨¤ë¤Ë¤Ä¤ì¡¤¹¤¬¤ê¤ò¸«¤»¤Æ¤¤¤¯¤«¤â¤·¤ì¤Ê¤¤¡£
 |
 |
¡¡º£²ó4Gamer¤Ç¤Ï¡¤¤½¤ó¤ÊJetson TK1¤ò¼ÂºÝ¤ËÂθ³¤Ç¤¤ë¤È¤¤¤¦¥»¥Ã¥·¥ç¥ó¤Ø»²²Ã¤Ç¤¤¿¤Î¤Ç¡¤¡ÖTegra K1ÅëºÜ¤Î¥ï¥ó¥Ü¡¼¥É¥³¥ó¥Ô¥å¡¼¥¿¡×¤Ë¿¨¤Ã¤Æ¤¤¿ÌÏÍͤò´Êñ¤Ë¤Þ¤È¤á¤Æ¤ß¤¿¤¤¤È»×¤¦¡£¥²¡¼¥à¤ÈľÀܤδط¸¤Ï¤Ê¤¤¤¬¡¤Tegra K1¤¬µ¤¤Ë¤Ê¤Ã¤Æ¤¤¤ë¿Í¤ä¡¤CUDA¤Ë¶½Ì£¤¬¤¢¤ë¿Í¤Ï¥Á¥§¥Ã¥¯¤·¤Æ¤Û¤·¤¤¡£
¤è¤¦¤³¤½Jetson TK1¤Ø
¡¡¤µ¤Æ¡¤¥»¥Ã¥·¥ç¥ó¥ë¡¼¥à¤Ç¤Ï¡¤³ÆÀʤ˥ǥ£¥¹¥×¥ì¥¤¤ä¥¡¼¥Ü¡¼¥É¤È¤ÎÀܳ¤ò½ª¤¨¤¿Jetson TK1¤¬ÃÖ¤¤¤Æ¤¢¤ê¡¤¼õ¹Ö¼Ô¤Ï¤¹¤°¤ËJetson TK1¤òÂθ³¤Ç¤¤ë¤è¤¦¤Ë¤Ê¤Ã¤Æ¤¤¤¿¡£
 |
 |
¡¡¥¡¼¥Ü¡¼¥É¤ä¥Þ¥¦¥¹¤Ï¡¤USBÀܳ¤Î¤â¤Î¤Ê¤é¥á¡¼¥«¡¼¤ÏÉÔÌä¤Ç¡¤Web¥«¥á¥é¤â¡¤¤è¤Û¤ÉÆüì¤Ê»ÅÍͤǤʤ¤¸Â¤êÀܳ¤Ç¤¤ë¤È¤Î¤³¤È¤À¤Ã¤¿¡£
¡¡ÅŸ»¥æ¥Ë¥Ã¥È¤Ï¡¤¥Î¡¼¥ÈPC¤ËÉÕ°¤·¤Æ¤¤½¤¦¤ÊAC¥¢¥À¥×¥¿¡¼¤Ç¡¤ÆþÎϤÏAC100-240V/1.5A¡¤½ÐÎϤÏDC12V/5.0A¤È¤¤¤¦¥¹¥Ú¥Ã¥¯¤À¡£¤³¤ì¤òJetson TK1¤ÎÅŸ»ÆþÎÏü»Ò¤ËÀܳ¤¹¤ë¤È¡¤¤¤¤¤Ê¤êJetson TK1¾å¤ÎÎäµÑ¥Õ¥¡¥ó¤¬²ó¤ê»Ï¤á¤Æµ¯Æ°¤¹¤ë»ÅÍͤˤʤäƤ¤¤¿¡£Ëü¤¬°ìµ¯Æ°¤·¤Ê¤¤¾ì¹ç¤Ï¡¤Jetson TK1¾å¤ËÍÑ°Õ¤µ¤ì¤¿¾®¤µ¤Ê¡ÎReset¡Ï¥Ü¥¿¥ó¤â¤·¤¯¤Ï¡ÎSoft Power¡Ï¥Ü¥¿¥ó¤ò²¡¤¹¤ÈºÆµ¯Æ°¤Ç¤¤ë¤è¤¦¤À¡£
¡¡µ¯Æ°¸å¡¤ºÇ½é¤Ë¤ä¤ë¤Ù¤¤³¤È¤È¤·¤Æ»ØƳ¤µ¤ì¤¿¤Î¤Ï¡¤¡ÎCtrl¡Ï¡Ü¡ÎAlt¡Ï¡Ü¡ÎT¡Ï¥¡¼¤Ç¥³¥Þ¥ó¥É¥×¥í¥ó¥×¥È¤ò½Ð¤·¤Æ¤«¤é¤Î¡¤
> setxkbmap -layout jp
¤ÎÆþÎϤǡ¤¤³¤ì¤Ï¡¤¥¡¼¥Ü¡¼¥É¤Î¥ì¥¤¥¢¥¦¥È¤òÆüËܸì»ÅÍͤØÊѹ¹¤¹¤ëÁàºî¤ËÁêÅö¤¹¤ë¡£
 |
¡¡µ¯Æ°¤·¤Æ¤·¤Þ¤¨¤Ð¡¤¤¿¤À¤ÎUbuntuÅëºÜPC¤È¤¤¤Ã¤¿´¶¤¸¤Ç¡¤LAN¥±¡¼¥Ö¥ë¤Ç¥Í¥Ã¥È¥ï¡¼¥¯¤ÈÀܳ¤¹¤ì¤Ð¡¤¥×¥ê¥¤¥ó¥¹¥È¡¼¥ë¤Î¡ÖMozilla Firefox¡×¤«¤éWeb¥Ö¥é¥¦¥¸¥ó¥°¤âÉáÄ̤˹Ԥ¨¤Æ¤·¤Þ¤¦¡£
 |
¡ÖCUDA¤Î¥×¥í¥°¥é¥ß¥ó¥°¤Î´ðÁäδðÁáפòÂθ³
¡¡¤³¤³¤Ç¡¤¡ÖHello¡×¤ò½ÐÎϤ¹¤ë¤À¤±¤Î´ðÁÃŪ¤Ê¥×¥í¥°¥é¥à¤ÎÆþÎϤ¬²Ý¤»¤é¤ì¤¿¡£
¡¡CUDA¤Ï¡¤C¸À¸ì¥Ù¡¼¥¹¤Î¥×¥í¥°¥é¥ß¥ó¥°¸À¸ì¤Ê¤Î¤À¤¬¡¤¡ÖÍÑ°Õ¤·¤¿¥Ç¡¼¥¿¤ËÂФ·¤Æ¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤µ¤»¤ë¡×¤È¤¤¤¦³µÇ°¤Î³ÈÄ¥¤¬¤Ê¤µ¤ì¤Æ¤¤¤ë¡£¤½¤ì¤ò»²²Ã¼Ô¤Ë¼Â´¶¤·¤Æ¤â¤é¤ª¤¦¤È¤¤¤¦¤Î¤¬ÁÀ¤¤¤À¡£
¡¡º£²ó¤Î¡ÖHello¡×¤Ç¤Ï¡¤2¡ß2¤Î¥¹¥ì¥Ã¥É¤òΩ¤Á¾å¤²¤Æ¡¤³Æ¥¹¥ì¥Ã¥É¤«¤é¡ÖHello¡×¤ò½ÐÎϤ¹¤ë¤è¤¦¤Ê¥×¥í¥°¥é¥à¤Ë¤Ê¤Ã¤Æ¤¤¤¿¡£
 |
 |
¡¡¥µ¥ó¥×¥ë¥ê¥¹¥È¤ÏEbersole»á¤¬¥¹¥é¥¤¥É¤Ç¼¨¤·¤Æ¤¤¤¿¤Î¤Ç¡¤¼ÂºÝ¤Ë¤ä¤ë¤³¤È¤Ï¤È¤¤¤¨¤Ð¡¤²èÌ̤Υµ¥ó¥×¥ë¤òÂǤÁ¹þ¤ß¡¤¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤À¤±¤À¡£
¡¡¤¿¤À¡¤CUDA¤Î´°Á´¤Ê½é¿´¼Ô¤«¤é¤¹¤ì¤Ð¡¤¥Æ¥¥¹¥È¥¨¥Ç¥£¥¿¤È¤·¤Æ¡Ögedit¡×¤¬ÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤È¤«¡¤CUDA¤Î¥½¡¼¥¹¥×¥í¥°¥é¥à¤Ï³ÈÄ¥»Ò¡Ö.cu¡×¤ÇºîÀ®¤¹¤ë¤È¤«¡¤¥³¥ó¥Ñ¥¤¥é¤Ï¡Önvcc¡×¤Ç¤¢¤ë¤È¤«¤¤¤Ã¤¿´ðÁÃŪ¤Ê¤³¤È¤ò¤³¤³¤Ç³Ø¤Ù¤ë¤Î¤Ç¤¢¤Ã¤¿¡£
CUDA 6¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤¹¤ë
¡¡Â³¤¤¤Æ¤Î²ÝÂê¤Ï¡¤Jetson TK1¤Ë¥×¥ê¥¤¥ó¥¹¥È¡¼¥ë¤µ¤ì¤Æ¤¤¤ëCUDA 6¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤³¤È¤Ç¤¢¤ë¡£
 |
¡¡¤³¤³¤Ç¤Ï¤Þ¤º¡¤¥³¥Þ¥ó¥É¥×¥í¥ó¥×¥È¤«¤éCUDA 6¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥Ô¡¼¤¹¤ë¤È¤³¤í¤«¤é»Ï¤Þ¤ë¡£¶ñÂÎŪ¤Ë¤Ï¡¤
> cuda-install-samples-6.0.sh .
¤ÈÆþÎϤ¹¤ë¤³¤È¤Ë¤Ê¤ë¡£ºÇ¸å¤Î¥¹¥Ú¡¼¥¹¤È¥Ô¥ê¥ª¥É¤ò˺¤ì¤º¤Ë¡£
¡¡Â³¤¤¤Æ¡¤
> cd NVIDIA_CUDA-6.0_Samples/5_Simulations/smokeParticles/
¤ÈÆþÎϤ·¡¤¥«¥ì¥ó¥È¥Ç¥£¥ì¥¯¥È¥ê¤ò¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à³¬Áؤβ¼¤È¤¹¤ë¡£Ä¹¤¤¥Ñ¥¹Ì¾¤ÏÃæÅÓ¤Þ¤ÇÂǤÁ¹þ¤ó¤Ç¡ÎTAB¡Ï¥¡¼¤ò²¡¤¹¤ÈÊä´°ÆþÎϤò¹Ô¤Ã¤Æ¤¯¤ì¤ë¤Î¤ÇÍøÍѤ·¤¿¤¤¡£
¡¡¥³¥ó¥Ñ¥¤¥ë¤Ï¡¤
> make
¤ÇOK¡£¥×¥í¥°¥é¥à¤ò½ñ¤´¹¤¨¤Ê¤¤¸Â¤ê¡¤¥³¥ó¥Ñ¥¤¥ë¤Ï°ìÅټ¹Ԥ¹¤ì¤Ð¤½¤ì¤Ç¤¤¤¤¡£
¡¡¼ÂºÝ¤Î¥×¥í¥°¥é¥à¼Â¹Ô¤Ï¡¤
> ../../bin/armv7l/linux/release/gnueabihf/smokeParticles
¤Ç¹Ô¤¨¤ë¡£¡ÖsmokeParticles¡×¤Î¤È¤³¤í¤òÊÌ¤Î¥×¥í¥°¥é¥à̾¤Ë¤¹¤ì¤Ð¡¤Ê̤Υµ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¥³¥ó¥Ñ¥¤¥ë¤·¤Æ¼Â¹Ô¤¹¤ë¤³¤È¤â²Äǽ¤À¡£
¡¡¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò³Îǧ¤·¤Æ¤ß¤¿¤È¤³¤í¡¤¡ÖNVIDIA_CUDA-6.0_Samples¡×³¬Áز¼¤Ë¤Ï¤µ¤Þ¤¶¤Þ¤Ê¤â¤Î¤ò³Îǧ¤Ç¤¤¿¤Î¤Ç¡¤Jetson TK1¤òÆþ¼ê¤Ç¤¤¿¤é¡¤¤¤¤í¤¤¤í¤È¼Â¹Ô¤·¤Æ¤ß¤ë¤È¤¤¤¤¤Î¤Ç¤Ï¤Ê¤«¤í¤¦¤«¡£¸«¤¿ÌÜŪ¤ËÌÌÇò¤¤¤Î¤Ï¡¤Á°½Ð¤Î¡Ö5_simulations¡×°Ê³°¤À¤È¡Ö2_Graphics¡×¤¢¤¿¤ê¤«¡£
¥³¥ó¥Ô¥å¡¼¥¿¥Ó¥¸¥ç¥ó¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤¹¤ë
 |
¡¡¶ñÂÎŪ¤Ë¤Ï¥³¥ó¥Ô¥å¡¼¥¿¥Ó¥¸¥ç¥óÍÑ¥×¥í¥°¥é¥ß¥ó¥°API¡ÖOpenCV¡×¤Î¥µ¥ó¥×¥ë¥³¡¼¥É¤òJetson TK1¾å¤Ç¼Â¹Ô¤¹¤ë²ÝÂê¤È¤Ê¤ë¡Ä¡Ä¤Î¤À¤¬¡¤¤½¤ÎÁ°¤Ë¡¤Web¥«¥á¥é¤ÎÆ°ºî¤ò³Îǧ¤¹¤ëɬÍפ¬¤¢¤ë¡£
¡¡¤³¤Î¥«¥á¥éÆ°ºî³Îǧ¥×¥í¥°¥é¥à¤Ï¡¤¡Ö¸¡½Ð¤·¤¿È©¿§Éôʬ¤òÎп§¤Ë¥Þ¡¼¥¥ó¥°¤¹¤ë¡×¤È¤¤¤¦¤â¤Î¤Ç¡¤¿Í¤Î´é¤¬Îп§¤Ë¥Þ¡¼¥¥ó¥°¤µ¤ì¤ì¤ÐOK¤È¤Ê¤ë¡£
 |
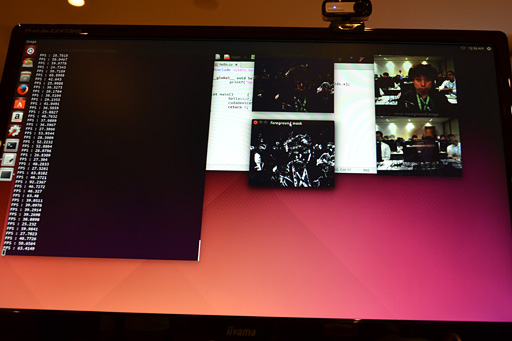
¡¡Web¥«¥á¥é¤ÎÆ°ºî¤¬´°Î»¤·¤¿¤È¤³¤í¤Ç¡¤¼ÂºÝ¤ÎCPU¤Ç¼ÂÁõ¤·¤¿OpenCV¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤ò¼Â¹Ô¤¹¤ë¡£
¡¡¼Â¹Ô¤¹¤ë¤Î¤Ï¡¤´Æ»ë¥«¥á¥é¤Î¤è¤¦¤ËÄêÅÀÀßÃÖ¤µ¤ì¤¿¥«¥á¥é¤Î±ÇÁü¤«¤é¡¤Æ°ÂΤÈÇطʤòʬΥ¤¹¤ë¥¢¥ë¥´¥ê¥º¥à¡Öº®¹çÀµµ¬Ê¬ÉۡסÊMOG¡§Mixture of Gaussian Distribution¡Ë¤Î¥µ¥ó¥×¥ë¤À¡£
¡¡¥³¥ó¥Ñ¥¤¥ë¸å¡¤
> ./bgfg_segm_cpu -c 0
¤È¤·¤Æ¼Â¹Ô¤µ¤ì¤ë¤Î¤¬CPUÈÇMOG¥¢¥ë¥´¥ê¥º¥à¤È¤Ê¤ë¡£¼Â¸ú¥Õ¥ì¡¼¥à¥ì¡¼¥È¤Ë¤·¤ÆÌó5¡Á7fps¤È¤¤¤Ã¤¿¤È¤³¤í¤À¡£
 |
¡¡Â³¤¤¤Æ¤Ï¡¤¤³¤Î¥µ¥ó¥×¥ë¥×¥í¥°¥é¥à¤òGPUÈǤ˲þ¤¤¹¤ë²ÝÂ꤬½Ð¤µ¤ì¤¿¤Î¤À¤¬¡¤¥»¥Ã¥·¥ç¥ó»þ´Ö¤¬Ã»¤¤¤³¤È¤â¤¢¤ê¡¤º£²ó¤Ï¡¤
> cp bgfg_segm_solution.cpp bgfg_segm_gpu.cpp
¤ÈÂǤÁ¹þ¤ß¡¤ÌÏÈϲóÅú¥×¥í¥°¥é¥à¡Öbgfg_segm_solution.cpp¡×¤ò¡Öbgfg_segm_gpu.cpp¡×¤È¤·¤Æ¥³¥Ô¡¼¤·¤Æ¥³¥ó¥Ñ¥¤¥ë¤¹¤ë¤Î¤ß¤Ëα¤Þ¤Ã¤¿¡£¶ñÂÎŪ¤Ë¤Ï¡¤
> make gpu
¡¡
¡¡¤Ç¥³¥ó¥Ñ¥¤¥ë¤·¡¤
> ./bgfg_segm_gpu -c 0
¤Ç¼Â¹Ô¤¹¤ë¡£
 |
¡¡Æ±°ì¥¢¥ë¥´¥ê¥º¥à¤ò¼Â¹Ô¤·¤Æ¤¤¤ë¤Î¤Ç¡¤½èÍýÆâÍƤËÊѤï¤ê¤Ï¤Ê¤¤°ìÊý¤Ç¡¤¼Â¸ú¥Õ¥ì¡¼¥à¥ì¡¼¥È¤ÏºÇÂç¤Ç10Çܰʾå¸þ¾å¤¹¤ë¤³¤È¤ò³Îǧ¤Ç¤¤¿¡£¤³¤ì¤³¤½¤¬GPU¥Ñ¥ï¡¼¤Î²¸·Ã¤Ç¤¢¤ê¡¤Jetson TK1¡¤¤½¤·¤ÆTegra K1¤ÎÄìÎϤȤ¤¤¦¤ï¤±¤Ç¤¢¤ë¡£
 |
Jetson TK1¤ÇGPIO¤òÀ©¸æ¤¹¤ë
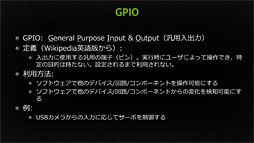 |
¡¡Jetson TK1¤Ë¤Ï¡¤Àè¤Ë½Ò¤Ù¤¿USB 3.0¤Î¤Û¤«¡¤¥·¥ê¥¢¥ë¥Ý¡¼¥È¤âÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤¬¡¤¤½¤ì¤è¤ê¤â¤µ¤é¤Ë¥í¡¼¥ì¥Ù¥ë¤ÊÆþ½ÐÎϤò¹Ô¤¦¤¿¤á¤ÎGPIO¡ÊGeneral Purpose Input & Output¡Ë¥Ý¡¼¥È¤âÈ÷¤ï¤Ã¤Æ¤¤¤ë¡£
 |
¡¡¤³¤³¤Þ¤Ç¤Î²ÝÂê¤Ï¡¤¤É¤Á¤é¤«¤È¤¤¤¨¤Ð¡Ö¥³¥ó¥Ô¥å¡¼¥¿¤È¤·¤ÆJetson TK1¤ò¤É¤¦»È¤¦¤«¡×¤¬ÂоݤȤʤäƤ¤¤¿¤¬¡¤ºÇ¸å¤Î²ÝÂê¤Ï¡¤GPIO¤ò»È¤Ã¤Æ³°Éô¥Ç¥Ð¥¤¥¹¤È¤ÎϢư¤òÌܻؤ¹¤â¤Î¤È¤Ê¤Ã¤¿¡£
¡¡¤È¤Ï¤¤¤¨¡¤Ã»¤¤»þ´Ö¤Ç¤½¤ì¤Û¤É¹âÅ٤ʤ³¤È¤Ï¤Ç¤¤Ê¤¤¤Î¤Ç¡¤ÀÜÅÀ¥¹¥¤¥Ã¥Á¤ÈLED¤òÁȤ߹ç¤ï¤»¤¿¥·¥ó¥×¥ë¤Ê¼Â¸³¤¬¹Ô¤ï¤ì¤¿¡£
¡¡ºÇ½é¤Î¼Â¸³¤Ï¡¤43ÈÖ¥Ô¥ó¤È45ÈÖ¥Ô¥ó¤Ëº¹¤·¹þ¤Þ¤ì¤¿LED¤òÅÀÌǤµ¤»¤ë¤È¤¤¤¦²ÝÂê¤À¡£
¡¡¥×¥í¥°¥é¥à¤Ï¡Ö~/lab/gpio/¡×¥Õ¥©¥ë¥À¤ËÍÑ°Õ¤µ¤ì¤Æ¤¤¤ë¤Î¤Ç¡¤¼ÂºÝ¤Ë¤ä¤ë¤³¤È¤Ï¡¤
> sudo python ~/lab/gpio/basic_blink.py
¤È¤·¤Æ¼Â¹Ô¤µ¤»¤ë¤À¤±¤Ç¤¢¤ë¡£
 |
 |
 |
¡¡ºÇ¸å¤Î²ÝÂê¤Ï¡¤GPIO¦¤Î46ÈÖ¥Ô¥ó¤È49ÈÖ¥Ô¥ó¤ËÀÜÅÀ¥¹¥¤¥Ã¥Á¤òÀߤ±¡¤¤³¤Î¥ª¥ó/¥ª¥Õ¤ò²¾ÁÛŪ¤Ê¼þÊÕµ¡´ï¤«¤é¤ÎÆþÎϤȤ·¡¤¤½¤ì¤Ë¸Æ±þ¤¹¤ë·Á¤Ç¥×¥í¥°¥é¥à¦¤ÇLED¤òÅÀÅô¤µ¤»¤ë¤È¤¤¤¦¤â¤Î¤À¡£
 |
¡¡¤³¤Á¤é¤â¥×¥í¥°¥é¥à¼«ÂΤÏÊݸºÑ¤ß¤Ê¤Î¤Ç¡¤
> sudo python ~/lab/gpio/advanced_blink.py
 |
¡¡ÄɲäΥµ¥Ö²ÝÂê¤È¤·¤Æ¡¤LED¤ÎÅÀÌÇ¥¿¥¤¥ß¥ó¥°¤òÊѹ¹¤¹¤ë¤È¤¤¤¦¤Î¤¬Í¿¤¨¤é¤ì¤¿¤¬¡¤¤³¤ì¤Ï¥×¥í¥°¥é¥à¤ò³«¤¤¤Æ¡ÖBLINK_INTERVAL =¡×¤Î¿ôÃͤòÊѤ¨¤ë¤À¤±¤ÇOK¡£Python¤Ï¥¹¥¯¥ê¥×¥È¸À¸ì¤Ê¤Î¤ÇºÆ¥³¥ó¥Ñ¥¤¥ë¤ÎɬÍפâ¤Ê¤¯¡¤¤¹¤°¤Ë¿ôÃÍÊѹ¹¤Î·ë²Ì¤òÈ¿±Ç¤·¤¿·Á¤Ç¼Â¹Ô¤Ç¤¤ë¤Î¤À¡£
¡ÈÍ·¤Ù¤ë¡Éɾ²Á¥Ü¡¼¥É¤È¤¤¤¨¤ëJetson TK1
¡¡¤Þ¤µ¤ËÆþÌç¤È¤¤¤Ã¤¿ÆâÍƤÀ¤Ã¤¿¤¬¡¤¤¤¤«¤¬¤À¤Ã¤¿¤í¤¦¤«¡£
¡¡Jetson TK1¤ÏÁȤ߹þ¤ßµ¡´ï¸þ¤±¤ÎÀ½Éʳ«È¯É¾²Á¥×¥é¥Ã¥È¥Õ¥©¡¼¥à¤Ç¡¤º£¤Î¤È¤³¤íήÄÌÎ̤âÈó¾ï¤Ë¾¯¤Ê¤¤¤¬¡¤¹ñÆâ¤Ç¤Ï¥ª¥ê¥ª¥¹¥Ú¥Ã¥¯¤¬Àµµ¬Éʤò°·¤Ã¤Æ¤¤¤ë¤Î¤Ç¡¤2Ëü4000±ß¡ÜÀǤǼ¡²ó°Ê¹ß¤ÎÆþ²Ùʬ¤òͽÌó¤Ç¤¤ë¡£Âç³Ø¤Î¸¦µæ¼¼¤Ï¤â¤Á¤í¤ó¤Î¤³¤È¡¤¸Ä¿Í¥ì¥Ù¥ë¤ÎÅŻҹ©ºîÍÑÅӤˤâ±þÍѤǤ¤½¤¦¤Ç¤¢¤ë¡£
¡¡¤³¤ì¤Þ¤Ç¡¤¤³¤³¤Þ¤Ç¹âÀǽ¤ÊGPU¥Ñ¥ï¡¼¤ò»È¤Ã¤Æ¤µ¤Þ¤¶¤Þ¤Ê¼þÊÕµ¡´ï¤ÈϢư¤µ¤»¤é¤ì¤ë°Â²Á¤Ê¥ï¥ó¥Ü¡¼¥É¥³¥ó¥Ô¥å¡¼¥¿¤Ï¤Û¤È¤ó¤É¤Ê¤«¤Ã¤¿¡£¾¯¤Ê¤¯¤È¤âÉ®¼Ô¤ÎÃΤë¸Â¤ê¤Ï³§Ìµ¤À¤Ã¤¿¤è¤¦¤Ë»×¤¦¡£Microsoft¤Î¡ÖKinect¡×¤¬¡¤¤½¤ÎÀǽ¤Ç¥¢¥Þ¥Á¥å¥¢ÅŻҹ©ºî¥·¡¼¥ó¤Ë¥â¡¼¥·¥ç¥ó¥»¥ó¥·¥ó¥°¥Ö¡¼¥à¤ò¹¤á¤¿¤è¤¦¤Ë¡¤Jetson TK1¤âº£¸å¡¤Î®ÄÌÎ̤¬Áý¤¨¤ë¤Ë¤Ä¤ì¡¤¹¤¬¤ê¤ò¸«¤»¤Æ¤¤¤¯¤«¤â¤·¤ì¤Ê¤¤¡£
NVIDIA¤ÎJetson TK1À½ÉʾðÊó¥Ú¡¼¥¸
4Gamer.netºÇ¿·¾ðÊó
¥×¥é¥Ã¥È¥Õ¥©¡¼¥àÊÌ¿·Ãåµ»ö
Áí¹ç¿·Ãåµ»ö
´ë²èµ»ö
¿·ÃåÏ¢ºÜ
¿·Ãå¥ì¥Ó¥å¡¼
¿·Ã奤¥ó¥¿¥Ó¥å¡¼