そんなこんなで,気がつけば発売日である10月28日まで2週間を切り,ファンもそわそわしてきた頃だと思われるアートディンクのロボットシミュレーションゲーム
「カルネージハート エクサ」(以下,CH エクサ)。数量限定の早期予約特典版(
関連記事)も予約して準備万端,あとはサバやマグロの眼球付近をべろべろしゃぶってDHAを摂取しながら発売を待つばかり,といったところだろうか(まだの人はお早めに。DHAじゃなくて予約のほう)。
2010年10月28日発売の「カルネージハート エクサ」。自律型ロボットシミュレーションの“真打ち”となる,シリーズの最新作である
 |
 |
TGS 2010などの修羅場も一段落したということで,ここで本作CH エクサのプレビューをお届けしたいと思う。
プレビューの切り口としては,まず今回で,簡単に前作「カルネージハート・ポータブル」(以下,CH ポータブル)からの
変更点と,シリーズファンはめちゃくちゃ気にしているであろう,今作からの新要素
「操縦型」にフォーカスした内容をお届けしてみたい。そして,次回でさらに細かい部分として,
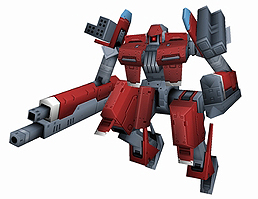
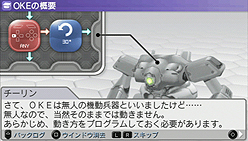
新OKE(Over Kill Engine:本作に登場するロボットのこと)や各種追加機能についてを紹介したいと思う。
さて,なんだかんだで本作の要注目キーワードは「操縦型」である。なにせ本シリーズは長らく“自律型ロボットシム”を謳っていたゲームシリーズ。つまりロボットというハードウェア部分はもちろん,その動作を定義するソフトウェア部分も,プログラミングという形でプレイヤーが実装し,完全自律動作のロボット同士を闘わせるという点を,最も大きな特徴としていた作品なのだ。
本作におけるロボットはいわゆる“ラジコン”ではない。どう動かすかも,プレイヤーが事前に組み込んでおくのだ。知っている人なら「レゴ マインドストーム」を想像すると分かりやすいかも
 |
そんな本作に,今作では「操縦型」として
“プレイヤーがロボットを操作できるようになる”という要素が加わった。自律型ロボットシムの本作に,である。ファンにとってはまさに青天の霹靂。それを聞いて「本末転倒じゃあああ!」と叫んで布団に倒れ込み,枕とシーツをボロボロになるまでに噛みちぎった,そんな人も多いのではないだろうか。
というわけで,本プレビューではそのあたりもフォローしつつ,実はあまりよく分かっていない操縦型の基本原理などを紹介したいと思う。序盤でいちおう本作の概要についても説明するが,“自律型ロボットシム”としての内容については
「こちら」の記事に詳しいので,そちらをご参照いただきたい。
“新作”そしてファインチューン版CH ポータブル
軸足は,ひとまず“操縦型”に置かれている印象
“カルネージハート”シリーズは,「カルネージハート」(1995年,アートディンク)に端を発するロボットシミュレーションゲームシリーズだ。プレイヤーはOKE(Over Kill Engine:本作に登場するロボット兵器のこと)と呼ばれる軍事兵器の武器や装甲,カラーリングなどのカスタマイズを行い,さらにその動作をプログラミングして,ライバルのOKEと戦わせる。
“プログラミング”という行為により,十人十色のアイデア溢れる機体を設計・実装できる点が,多くの人を魅了した。
こう言うと失礼かもしれないが,まさに“King of ニッチ”といえそうなジャンルのカルネージハート。それでもこの手のゲームが好きな側からすると「いや,これがまさにゲームならではの面白さなんですけど」みたいなところはある
 |
前作「カルネージハート・ポータブル」では,過去のシリーズ作品からプログラミング部分の操作性が改善されたほか,携帯ゲーム機対応という特性も相まってか,シリーズのファン,さらには新たなプレイヤーを,その没入必至のゲーム性で魅惑。そして,CH ポータブルからさらに進化し,プレイヤー自らがOKEを操作できるという“操縦型”という概念を引っさげて登場したのが,今作「カルネージハート エクサ」というわけだ。極力サラッと書いてみたが,分かりにくいという人は,新作紹介(
関連記事1,
関連記事2)あたりが分かりやすいので,参照してほしい。
この不気味な(?)画面が本作の主戦場。“チップ”を決められた領域に配置していくことで,プログラミングを行う。プログラミング関連のエデュケーションソフトなんかで,チップを使ったこの手の手法が用いられることは割と多い
 |
さて,今回サンプルで拝借していているROMでは,まずメインメニューで「ゲームをはじめる」「つづきから遊ぶ」のどちらかを選び,その後「シナリオゲーム」か「バトルゲーム」を選ぶ(いずれかのセーブデータを選択する)ことでゲームを始められた。
シナリオモードは,いわゆるゲームのストーリーモード。そして同時に,本作のチュートリアルを受け持つモードでもある。
驚くのは,
そのボリュームだ。このチュートリアル要素に関して,本作のディレクターを務めるアートディンクの飯塚氏は,Twitterで「前作比4倍くらいボリュームアップしてます」と語っていたが,その言葉に偽りはない。ゲームがゲームだけに,懇切丁寧なチュートリアルは外せない要素ではあるが,「これで分からないとは言わせない」という無言のメッセージが伝わってくる内容である。
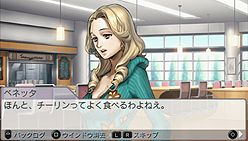
ヒロインのシュー・チーリンが,家庭教師としてカイル・シギサワという謎の富豪にOKEの製作方法をレクチャーするというストーリーに合わせて,チュートリアルが展開される。ちなみにシナリオは「神曲奏界ポリフォニカ」「スクラップド・プリンセス」で知られるライトノベル作家の榊 一郎さん,キャラクターデザインはイラストレーターの碧 風羽(みどりふう)さんが担当。当然(?)フルボイスだ
 |
シーケンシャルにこなしていかねばならないチュートリアルだけに,このボリュームはなかなか忍耐が必要かも。初心者対策だと思われるが,シナリオモードでエンブレム編集の各メニューまで詳細に説明する必要があるのかなど,若干……いや,まぁ,細かいこたぁいいやな!
 |
 |
古参のファンでも,このチュートリアルは一度プレイしておくべきだろう。新チップの,あるいは仕様変更された既存チップの動作は,ここで一通りチェックできるのだ
 |
 |
また,これはある程度予想できたことだが,やはり本作は
“操縦型”に軸足を置いている印象だ。それはチュートリアルにも現れており,シナリオモードではまず“操縦型”,つまりプレイヤーがリアルタイムでOKEを操作するタイプの解説が行われる。まぁシリーズのファンにとっても,直近で必要なのは操縦型のチュートリアルだということも考慮されているのだろう。
チュートリアルでは,使えるチップがストーリー進行に合わせて少しずつアンロックされ,徐々に複雑なプログラムが組めるようになっていく。要所要所に「ミッション」という形で課題が挿入されており,特定の条件をクリアしないと先へ進めないようになっている。チュートリアルを終わらせられる力量があれば,それなりのプログラムが組めるようになっている,というわけだ。
“先へ進めない”と書いたが,チュートリアルのソフトウェア設計には「答案サンプル」が用意されている。この答案をペーストしてプログラムを組めば,まぁ序盤の大抵のミッションは先へ進められるだろう(“大抵”だけど)
 |
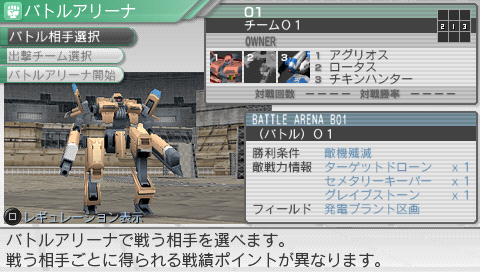
一方のバトルゲームモードでは,最初からほぼすべてのチップを利用できる。こちらでは,各種武装を用いて自律型・操縦型のOKEを自由に組み上げられるが,詳細な内容については次回でご紹介していきたい。
というわけで以下より,チュートリアルとバトルゲームで試した“操縦型”について紹介していこう。
既存チップももちろん拡張されている。たとえば移動チップで前後左右以外に“斜め”の動作が加わっている。この手の個々の“関数”が拡張されているため,CH ポータブルと比較して,同じCPU領域でもより複雑な動きができるに違いない
 |
 |
次回は新OKEなどもバリバリご紹介しよう。あ,ちなみに今作はメディアインストールに対応しているので,同じUMDでも前作よりさくさく動く
 |
 |
 |
動かすだけなら割と簡単に実装できる“操縦型”
動かすだけなら。
では早速“操縦型”の基本原理を見ていこう。ここからはある程度本作のプログラミング部分を理解している既存プレイヤー向けの内容となるが,チップ配置を見ればなんとなく想像がつくかもしれない(?)ので,興味のある人はぜひぼーっと眺めてみてほしい。
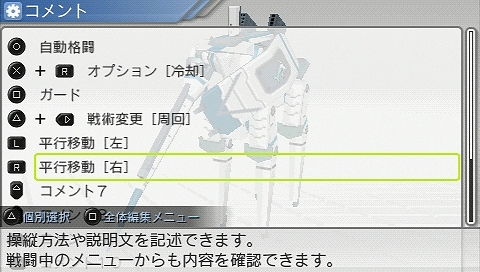
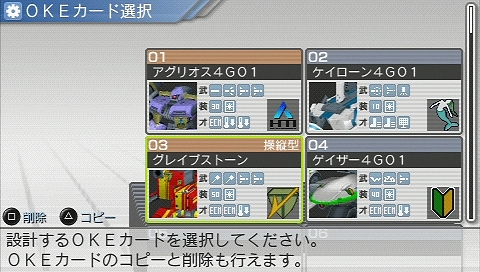
制作したOKEは,すべて“OKEカード”という状態でラベリングされて保存される。OKEカードにはプレイヤーが識別するための「識別名」を設定できるほか,コメントとして「どのボタンを押せばどんな動作をするか」といったテキストも残せる。格闘ゲームのコマンド表のようでちょっと面白い
 |
本作において「“操縦型”OKEを制作する」とは,厳密には「“操縦型”の関連チップを使用したOKEを制作する」と言い替えられる。つまり,たとえプレイヤーが自律型との認識で,完全に自動動作するOKEを組み上げたとしても,――プログラムのループ中に存在するか否かに関わらず――操縦型関連チップが一つでも混入していれば,そのOKEは
操縦型と判定される。まぁこの辺りは,対戦や大会などで当該OKEがレギュレーションを満たしているか否かを機械的に判断するための仕様だと考えられるが,まずは本作における操縦型とはそういうものであると理解しておこう。
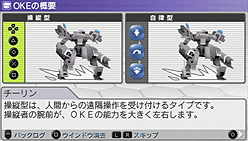
後述する操縦型の関連チップを使用すると,当該OKEのOKEカード右上部には「操縦型」と表示される。使用しなければ「自律型」と表示
 |
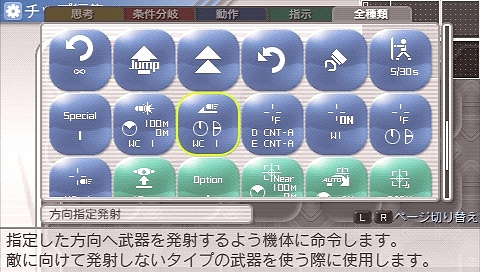
そして,前述の“操縦型関連チップ”というのが,以下のチップ群だ。群というか,3枚なんだけど。
「ボタン状態取得」(思考チップ)
現在のボタン状態を取得するチップ。
「ボタン判定」(条件分岐チップ)
ボタンの状態を判定するチップ。なお判定できるのはパッドの方向キー(上下左右),×○□△ボタン,およびLRボタン。また取得できるボタン状態は,「全てが押されている」「いずれかが押されている」「いずれかが押された」「いずれかが離された」「いずれかが変わった」の5パターン。
「アナログ判定」(条件分岐チップ)
アナログパッドの状態を判定するチップ(「ボタン判定」のアナログパッド版)。判定できるのは,アナログのXY軸と各軸のアナログ値。分岐条件は“以上”と“以下”。
上記チップが一つでも使用されていれば,そのOKEは操縦型扱いとなる。そして操縦型として実際にPSPの各種ボタン・パッドからの入力を受け付ける場合の基本的なチップ配置の“流れ”は,以下のとおりだ。
「ボタン状態取得」チップによって,現在のボタン状態を取得する
↓
「ボタン判定」チップあるいは「アナログ判定」チップにより,現在のボタン状態に合わせて処理を分岐
↓
次の条件分岐/思考/動作/指示チップへ
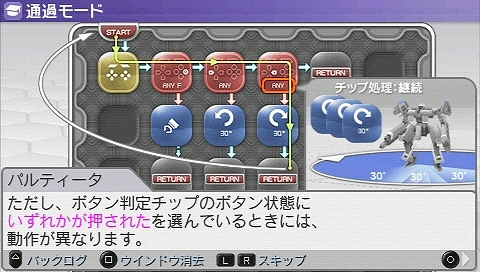
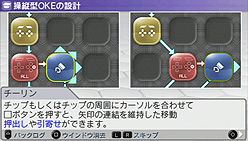
こう文字で書くとなんだかややこしいが,チップ配置を見れば一目瞭然のはず。以下に示したチップ配置は,方向キーとLRボタンに,OKEの前後移動と左右旋回,左右平行移動を割り当てたものである。おそらくこれが最もオーソドックス,というか,“ただ動かすだけ”といった基本的なチップ配置となるはずだ。
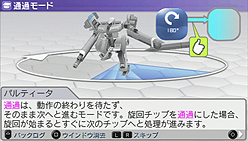
スタート直後にボタン状態を取得。まず○ボタン押下を判定して,押されていれば格闘(実行モード:完了まで思考停止)。それ以下は,すべてそれぞれのボタンに合わせて方向キーとLRボタンを,前後移動と左右旋回,左右平行移動に実行モード:通過で割り当てている。ボタン判定チップのボタン状態は,すべて「いずれかが押されている」を選択
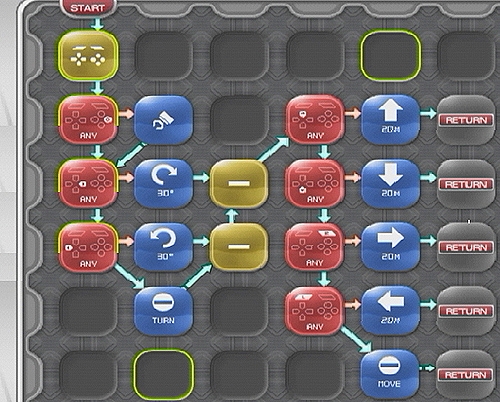 |
※複数の設計画面を切り貼りしているため、画像にいびつな部分があります
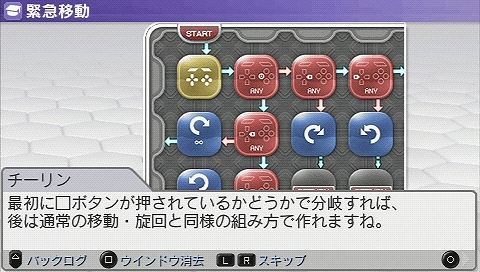
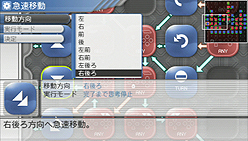
上記の例は,1ボタン=1動作という形に割り当てているが,もちろんそれだけではまともに戦えない。発展系として「方向キー上下+□キーで前後急速移動」といった複合キーでの動作を定義したり,OKEごとの特殊動作を吟味して旋回を高速化したり,といった工夫が必要になってくるわけだ。
ボタンの複数同時押しに対応したもの。なにをやっているか,だいたい分かると思う
 |
操縦型の基本原理は,実はこれぐらいのもの。あとはこれらにどのように肉付けしていくか,といった部分に知恵を注ぐだけだ。
これらの内容が初心者にとって,そして自律型と比較してどの程度ハードルが低くなっているのかは想像が難しい。しかし,操作可能なロボットアクションゲームが溢れているだけに,経験則から操縦型の方が学びやすいのかもしれない。
関連チップの少なさが物語る操縦型の使いどころ
CPUとプレイヤーの脳・指で仕事をどう分担するか?
さて,ここまで読んだ人は分かるとおり,操縦型の関連チップは非常に少ない(3チップ!)。……にも関わらず,OKEを操縦型として手足のように動かすには必要にして十分である。このような形でのシンプルな実装は,まさにプレイヤーがアイデアを盛り込みやすいように配慮した結果だろう。ピストルよりもバールのほうが,使い道に幅があるのと同じことだ(あれ? 分かりにくい?)。
CH エクサのかわいいチップ達
 |
OKE操作に格闘ゲームのような“コマンド”を作ってみたり,アートディンクが謳っているように“自律型vs.操縦型”で闘ってみたりという部分に対して,もちろん興味は尽きない。だが,この操縦型の根本的な面白さは,
OKEのCPUとプレイヤーの脳・身体とで,どの程度仕事(動作・思考)を切り分けて分担するのかといった部分に集約されるのではないだろうか?
単純に考えて,まずは前述したようなシンプルな操作体系のOKEを作って,各種動作をマクロのように複雑にしていくタイプを思いつく。これはある意味,OKEを搭乗兵器として,プレイヤーの身体能力を拡張していくような製作法だろう。
もう一方は,基本的には自律型で,状況に応じて適時キーを入れることで戦術を切り替えるというタイプ。能動的な行動と受動的な反応,どちらの動作も最速で行えるのが特徴となりそうな実装方法だ。
もちろんどちらも一長一短だが,個人的には能力拡張型と反応型のちょうどいいバランスを探すのが,この“操縦型”のコアになる楽しみ方なのかな,と感じた。そしてこのバランスは,対戦時の“ルール”にも大きく左右されるため,ゲーム側が,あるいは本作のコミュニティがどのような遊び方を提供・開拓していくのか,考えただけでもワクワクしてくる。正直いって“操縦型”の登場に,
「まじかよ」と思っていただけに,逆に楽しみも倍増してしまった感じである。
というわけで,プレビューの“その1”では,簡単な本作の概要と共に“操縦型”の基本原理などを紹介した。次回は,リプレイ編集機能などの各種追加機能,新OKE,新チップなどの細かい部分を見ていきたい。スクリーンショットも多めでお届けする予定なので,お楽しみに。
■おまけ ディレクター飯塚氏のTwitterより
本作の産みの親であり,ファンから
“神”と崇められたり無茶な注文を付けられたりしている本作のディレクター,飯塚正樹氏。氏は,Twitterでファンからの質問などを受け付けていたことがあり,そのツイートにはなかなか重要なことが記載されていることもあった(たとえば「エンブレムインポート機能」などは,Twitterでのファンからの要望によって追加実装されたとかされていないとか)。今回プレビューで使用しているサンプルもマスター版ではないので,現時点で,事実上飯塚氏の発言でしか得られていない情報があるかもしれない。
というわけで,ざっくりとではあるが,飯塚氏の発言から得られた情報を以下にまとめておきたい。もちろん,これはあくまでも飯塚氏の(半分プライベートな?)発言であって,実際にどこまでが実現されているかを保証するものではないので,その点はご注意を。
・「チュートリアルは前作の4倍程度のボリューム(シリーズ中で最強(最長?)」
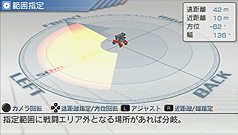
・「探査範囲指定時のアジャスト機能は実装」
・「4×4のCPUはスタン攻撃に対して無敵」
・「エネルギー搭載率を上げると耐熱キャパシティが落ちる」
・「CH エクサのダウンロード版に関しては未定」
・「チームデータ,マッチデータは1000個,リプレイは1000個×複数フォルダに保存可能」
・「装甲の種類は前作のママ」
・「スクリーンショット撮影機能は実装が完了」
・「ロック機能に“地上型”が追加されている」
・「発売前の体験版リリースは未定」
・「積載量をオーバーするとエネルギー消費が激しくなる」
・「サブプログラム内で2つめのサブプログラムへ飛ぶことができる。ただし再帰させると10段でスタックオーバーして無視される」
・「チップ領域に変更なし」
・「ホーム/アウェイの差が出ないように対処したが完全かどうかは不明」
・「ダウンロードコンテンツなどは未定」
・「基本的にはCH ポータブルの続編ではなく新作として制作した」
・「CH ポータブルの3倍程度高低差のあるマップがある」
・「操縦型可否はマッチメイクのレギュレーションで設定可能」
・「CH ポータブルからセーブデータなどの引き継ぎはなし」
























 カルネージハート エクサ
カルネージハート エクサ
